「恐惑穀效應」,真的存在嗎?
1970年,日本機器人學家森政弘(Mori Masahiro)在一篇題為《恐惑穀》(不気味の穀)的隨筆中提出了以下觀點:
一般情況下,人們對機器人的好感度會隨著機器人類人程度的提高而增長,例如玩具機器人比工業機器人更容易讓人產生親近感;然而,二者之間的這種正相關關係會在某一個節點被打破,即機器人在外表上非常接近人類卻仍存在差異的時候,人們的好感度會陡然下降甚至出現消極反應;但若這些差異進一步減少,人們的好感度還會再次上升,直到機器人與普通健全人類看起來相差無幾。
在這條情感變化曲線上出現的低窪段,便被森政弘稱為「恐惑穀」,並且他強調,活動的機器人可能會造成更加劇烈的情感反應。
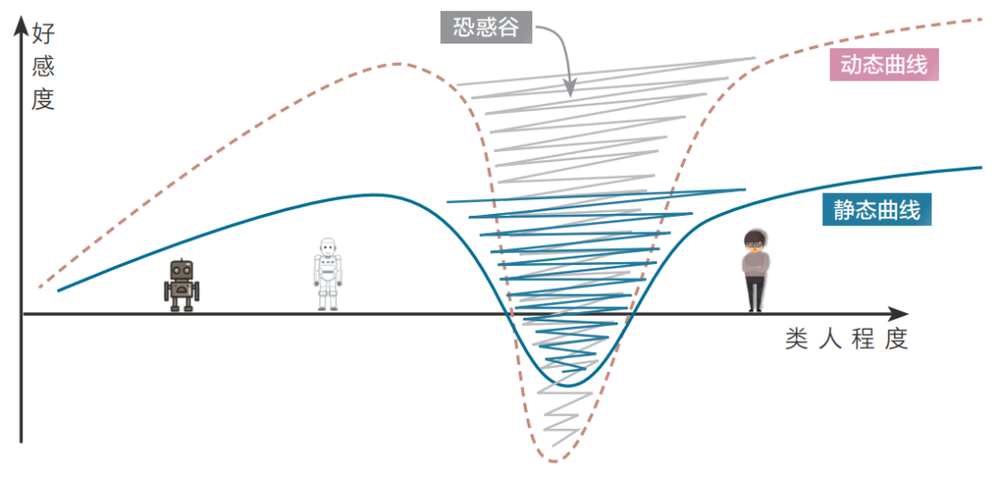 恐惑穀曲線示意圖。由本文作者提供
恐惑穀曲線示意圖。由本文作者提供換言之,這是一個關於人們對機器人外表可能產生的情感變化的假設。之所以稱之為「假設」,是因為森的觀點至今未能得到明確的驗證或解釋,但有趣之處在於,人們似乎能夠對森提出的現象感同身受,信手拈來幾個不「討喜」的機器人。這讓恐惑穀成了一樁科學懸案,那種不可名狀的恐懼也給機器人增添了一抹神秘色彩。
話雖如此,人形機器人的時代不久將至,相較半個世紀之前,當下對這個問題的探討更加具有現實意味,甚至帶著一股緊迫感。2023年10月,中國工業和信息化部印發《人形機器人創新發展指導意見》(以下簡寫作《指導意見》),指出人形機器人是未來產業的新賽道,並計劃到2025年初步建立人形機器人創新體系。
根據《指導意見》,人形機器人將在特種領域、製造業典型場景以及醫療、家政等民生領域和農業、物流等重點行業得到更加廣泛的拓展應用,而前提是在關鍵技術上取得突破,即打造人形機器人的「大腦」(環境感知、行為控制、人機交互能力)、「小腦」(運動控制能力)以及「肢體」(輕量化、高強度、高精度傳感的仿人機械臂的開發)。
毫無疑問,機器人製造技術在不斷走向成熟,而在近年呈飛躍式發展的人工智能技術的加持下,人形機器人的性能更將得到大幅提升。但與此同時,我們不能忽略的是當人形機器人從工廠走向家庭日常時普通用戶的認知與接受。
從另一個角度說,人形機器人因其特殊的類人屬性,也使人們對其「綜合素質」提出了更高要求,機器人工程學和計算機科學等理工學科誌在攻克其「腦」和「肢體」的技術難題,哲學和文學在三個世紀之前就開始談論其「心」與「情」的困境,而恐惑穀提出的則是其「臉面」問題。
舉一個簡單的例子,有朝一日,若護理機器人已經能夠熟練地幫助病人端茶送水、穿衣喂藥(儘管目前它們尚不能很好地控制開關微波爐的力度),人們是否就可以任性地為其選擇一張臉或者一種特殊的造型呢?經驗提醒我們不行,但我們更加需要知道為何不行以及應該如何選擇。
設計美學和人體工學在機器人工程學中往往處於邊緣地位,卻絕不是玄學。通過對恐惑穀問題的梳理,至少可以讓我們瞭解在人形機器人的發展歷程中,學界、業界圍繞機器人的「臉面」所做的努力與探索。答案或許並不唯一,但這是一種不可或缺的視角,更是一種態度。
半個世紀前的假設
現代機器人的概念源於捷克劇作家卡雷爾·恰佩克(KarelČapek)在1920年發表的劇本《羅素姆萬能機器人》中首次使用的「robot」一詞,但恰佩克的robot是基於生物化學技術的人造人,並非機械的產物。而受技術所限,人類的機器人幻想是依靠金屬製造來實現的,同時西歐從中世紀起開始盛行的機械人偶文化的影響也不容忽視。
但如今,我們已經很少去追溯其起源,正如「機器人」這個頗微妙的名詞性偏正短語所表達的那樣,我們預設了機器人的類人屬性,即使它們在智能或行為方面與人還有較大差距,接近人類的外形也是必要條件(因此對於不具備此特徵的,需要強調其是工業機器人,至於虛擬社交機器人的出現則是後話)。
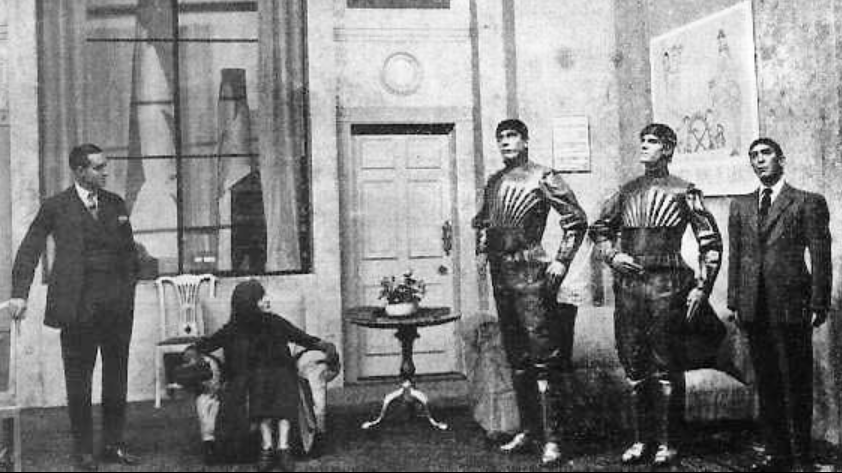 卡雷爾·恰佩克的科幻舞台劇《R.U.R.》中的機器人。©wikipedia
卡雷爾·恰佩克的科幻舞台劇《R.U.R.》中的機器人。©wikipedia20世紀20年代以後,早期的實體機器人陸續問世,文學、影視作品中有關機器人的書寫也日漸豐富起來,二者相互促進,一同助力人類的機器人之夢。
因此,在半個世紀後,森政弘寫下《恐惑穀》這篇隨筆時,多少是帶有對未來的預判的。因為彼時相對成熟的機器人是車間的機械手臂,勉強能稱為人形機器人的僅是四方的金屬零件拚湊體,理想中的人形機器人形象只出現在虛構的文學、動漫作品中,例如1963年首次出現在電視動畫中的阿童木。
戰後的日本雖然積極發展生產自動化,但將機器人視作一門學問,也是1983年日本機器人學會成立之後的事情了。也正因如此,《恐惑穀》在發表後的30年間並未受到應有的關注,直到2005年,曾在日本大阪大學工作的美國機器人學家卡爾·馬克多曼(Karl MacDorman)將森的隨筆譯為英文並在國際學會上發表後,學術界才將目光投向了這個似乎過於超前的假設。
所謂30年遇冷一朝花開,此後人們對恐惑穀的關注持續至今,熱度有增無減,涉及領域也愈加多元。在此背後,機器人技術的進步誠然是首要原因,計算機圖像、虛擬現實技術也拓展了這個假設的用武之地。在後者的影響下,相關研究在2010年後再次出現大幅增長。
2014年,英國未來學家李察·沃森(Richard Watson)將恐惑穀列入人類關於未來最重要的50個構想之一。但受到關注也意味著將遭到更多的審視。有人質疑,有人追捧,有人嘗試推翻,有人希望其能更進一步,誕生於半個世紀前的這個假設被反復推敲,以回答關於恐惑穀的靈魂三問:是什麼?為什麼?怎麼辦?
前提之問:恐惑穀存在嗎?
與其他理論相比,恐惑穀的一個顯著特徵是,它在被構建的同時又在不斷被推翻,至今仍有大量研究在圍繞一個根本性問題展開:恐惑穀究竟存在與否?森政弘的恐惑穀曲線就像沒有標註地點的藏寶圖,引人遐想卻又留下了太多的疑點與盲區。
密歇根大學名譽教授、日本文化研究者詹妮弗·羅拔臣(Jennifer Robertson)曾提出以下幾點質疑,儘管瑣碎卻有一定的代表性:
現實中的人形機器人尚未達到科幻小說中的程度,與人類的實際互動很少。
森的觀點僅是基於印象的推測,示意圖過於簡單。
不應將恐惑穀視為人類的普遍反應,要考慮不同個體的情況以及不同屬性特徵的影響。
忽略了時間維度,恐惑穀現象可能僅會維持極短的時間。
英譯「uncanny valley」存在誤導性,「valley of eerie feeling」更為準確。
現代工業機器人也可以具備擬人特徵,讓人類產生親和感。
逼真的假肢有助於殘障人士回歸正常生活,但森將外觀置於功能之上,對殘障群體缺乏關愛。
以女性對假肢的恐懼為例極為不妥,利用了對女性的刻板印象,也賦予了健全人以特權。
森對殘障人士和女性的態度如何姑且不論,在森的隨筆里,確實有坐標軸卻無坐標值,談論了假肢卻無具體的人形機器人案例,這些也成為眾多質疑派關注的焦點。
有人質疑森的恐惑穀假設的原創性,認為他參考了心理學家恩安斯·延齊(Ernst Jentsch,1906年發表《恐惑心理學》)和西格蒙德·費奧伊德(Sigmund Freud,1919年發表《論恐惑》)的理論。有研究對三人的論著做了詳細比較,森政弘本人也對此做過回應,在其他學者的支持下公開予以否認。
當然,這類質疑並不構成恐惑穀假設的致命問題,更多研究希望通過實證方法來驗證森式曲線的合理性與科學性。這些討論主要集中在三個問題上:一是機器人的類人程度達到某個節點時人們的好感度驟降的結論是否成立,二是如何通過維度標準化來確定恐惑穀的頂點和穀底在坐標軸上的精準位置,三是經歷情感衝擊後人類對機器人的好感度回升能否實現。
目前主流的做法是以實驗方式記錄並總結實驗參與者對類人程度各異的多種機器人的反應規律。儘管實驗設計與分析工具在不斷進化,例如使用的機器人從實體擴展到虛擬數字人,測量指標逐步豐富,測試方法也從外部觀察、問卷調查發展到使用眼動儀、腦波測試儀,但由於實驗室實驗本身的局限、樣本數量的限制和維度的混亂,這些研究難以產生統一的、能夠獲得廣泛認同的結果,大多是在一定條件下進行的有限驗證,因此上述三個問題至今仍無定論。
在這種情況下,也衍生出了一些推翻、修正或拓展恐惑穀曲線的觀點。例如,有研究者指出曲線應該呈現為「N」形而非「V」形,因為實驗結果顯示人們更傾向於選擇最逼真的假肢。
而來自新西蘭簡迪伯雷大學人機交互技術實驗室的基斯托夫·畢特內克(Christoph Bartneck)團隊建議用「恐惑崖」(Uncanny Cliff)模型代替恐惑穀,因為實驗發現人們對某些玩具機器人或人形機器人的喜愛遠遠超過真人。
此外,美國未來學家占美斯·卡斯拿斯奧(Jamais Cascio)提出了存在「第二恐惑穀」(the second Uncanny Valley)的可能,即當高仿真人形機器人的類人程度在達到普通健全人的水平之後走向超人類或後人類時,或許會再次引發好感度的下滑。
鑒於此,學界至今未將恐惑穀假設升級為恐惑穀理論。經過諸多研究的縫縫補補,恐惑穀成了一個更加豐富、寬泛的研究領域,卻始終未能建構起一個更加精準、規範的理論體系。這也是森政弘在半個世紀前的假設至今未被取代的原因所在,或許它無法提供完善的理論指導,但人類無法忽視他們在面對機器人時可能出現的情感波動,因為這種概率的存在對於生產實踐而言舉足輕重。
因此也有研究者提議區別看待恐惑穀假設和恐惑穀現象,前者是工程學問題,後者是心理學問題。換言之,學術探討仍須繼續,而應用問題大可一事一議。
本質之問:恐惑感從何而來?
話說回來,森政弘提出的好感度驟降並非完全出於臆測,起碼能夠獲得一部分人的經驗性認同。那麼應該如何理解這種不可思議的恐惑感呢?森在隨筆的最後提出了一種猜測:這可能是出於人類的防衛本能。但對此他並未做進一步說明,也未在後續研究中對這個問題再做深究。
有研究發現動物(如猿猴)在面對具有恐惑特徵的面孔時也會表現出迴避行為,並認為這個結果驗證了恐惑穀效應的進化起源。這種「本能論」獲得了一些學者的支持,但關於其認知原理的解釋仍存在不少分歧。
一份關於恐惑穀成因的研究綜述將現有的主要觀點分為兩類:一類認為這是由對人工物和人類的分類困難造成的,另一類認為原因在於對人工物和人類特徵的認知不匹配。
相比前者,後者得到了更多的實證支持,例如人工物和人類特徵的真實程度不一致(如在人工臉上配置擬真人眼睛)以及一些非典型特徵的存在(如過度放大的眼睛)確實能夠引發恐惑穀現象。但後者的適用範圍並不僅限於機器人,同時在解釋一些沒有明顯外觀瑕疵的機器人案例時也顯得薄弱,因此前者依然是許多學者嘗試繼續探究的方向。
例如,日本東北大學機械系教授、科幻作家瀨名秀明(Sena Hideaki)提出可以用「家族的相似性悖論」來解釋這種現象。他指出,把杯子漸變(morphing)為盤子是不會產生恐惑穀現象的,但從機器人到人的漸變則不同,因為觀察者自己也包含在人類之中,當機器人和人類越來越接近時,人類的主觀意識或者說主體意識會自然啟動,例如在判斷生與死、胚胎和胎兒的邊界時也會有類似的感覺。
瀬名秀明ロボット學論集,瀬名秀明
勁草書房 2008
謝菲爾德大學計算機科學系的羅渣·摩亞(Roger K.Moore)曾嘗試用貝葉斯分類感知模型去解釋帶有認知衝突的刺激如何在類別邊界引發感知緊張。但量化分析的結果並不一致,蘇黎世大學的馬庫斯·奇塔姆(Marcus Cheetham)團隊的實驗就顯示了完全相反的傾向:在人機分界線的曖昧區域,觀察者的情緒反應似乎更為積極。
總之,討論至此便會發現,無論是分類困難或是認知不匹配,其討論對象早已超越了機器人外觀的範疇,或者說森政弘重視的機器人外觀問題並不足以解釋並解決他提出的恐惑穀假設。森也提到了機器人的運動會加劇恐惑穀效應,其實行為本身,尤其是與外觀不匹配的行為就可能引發恐惑穀現象。
在此基礎上,不少學者將相關思考拓展到外觀和行為等表象因素之外。南丹麥大學的拉斯姆斯·加恩-安達臣(Rasmus Gahrn-Andersen)認為,根據現象學理論,應該基於反思性經驗將認知對象區分為自主性和非自主性,而不是森基於觀察提出的類人與非類人。當人類感知到這兩種狀態發生轉變時,由於違背了認知主體的期望和經驗,原有的親和狀態就會被打破。
加恩—安達臣指出,恐惑穀可以看作赫特格爾提出的現代技術「挑戰性揭示」(challenging revealing)性質的一個基礎案例,如果其成立,那麼非人形機器人也可能產生恐惑穀效應。
與之呼應的還有心理學家卻特·格雷(Kurt Gray)及其導師丹尼爾·韋格鈉(Daniel Wegner)提出的「心靈感知假設」(Mind Perception Hypothesis)。他們認為人形機器人之所以令人不安,是因為它們的外觀會讓人們把問題歸咎於它們的心靈,認為它們已經擁有了人類的思維。因此,即使沒有類人的外觀,一旦機器人擁有了感受和感覺的能力,而非僅僅掌握反應和行為能力時,就會引發恐惑情緒。
以上關於恐惑穀成因的追問從最初的外觀設計到行為舉止,又逐步深入思維與心智,討論對象也跳出了人形機器人的框限。儘管現有研究尚不能從認知結構層面完整地展示其形成機理,但這些探討給業界在應對相關問題時提供了更豐富、更多元的啟發。
對策之問:退一步海闊天空?
如上所述,關於恐惑穀的理論認知還處於發展建構階段,相比之下,機器人製造以及圖像製作領域在採取對策方面更為迅速果斷,以規避可能存在的風險。
避免跌入情感變化的穀底可以有兩種思路:一種是退回到曲線左側的頂點附近,即採用一定程度的類人設計卻能獲得較高好感度的保守性選擇;另一種則是跨越穀底,攀登上右側的頂點,挑戰接近普通健全人的高仿真人形機器人。
森政弘的態度在隨筆中有明確的交代,他建議設計師不要過度追求高度仿人,避免因跌入恐惑穀而付出巨大代價。2020年在接受筆者採訪時,森再次強調了這個觀點。儘管他提出的用佛手、佛像替代高仿真設計的方案備受質疑,但在現實中,森的規避思路被廣泛接受。
前文提到的羅拔臣曾指出,很多日本學者熟悉這個問題,卻極少有國際論文發表。這是事實,即便在日本本土,相關討論也不多見。值得注意的是,「恐惑穀」被收錄進日本的國民字典《大辭泉》,這就說明了問題所在:在日本,恐惑穀被定位為「知識」而非不成熟的理論假設,學界研究和業界生產大多是在此前提下進行的。
換言之,恐惑穀是一條「暗默知」的規則,已經成為行業內的基本常識。人們更關注的是如何才能規避恐惑穀,相比跨越恐惑穀,這是一個相對容易實現的目標,採用非高度類人的外觀設計以及在感知能力上做去人性化處理是常見的策略。例如日本本田的ASIMO、富士通的HOAP系列等知名度較高的機器人都採用了類似宇航員的「大白」造型。
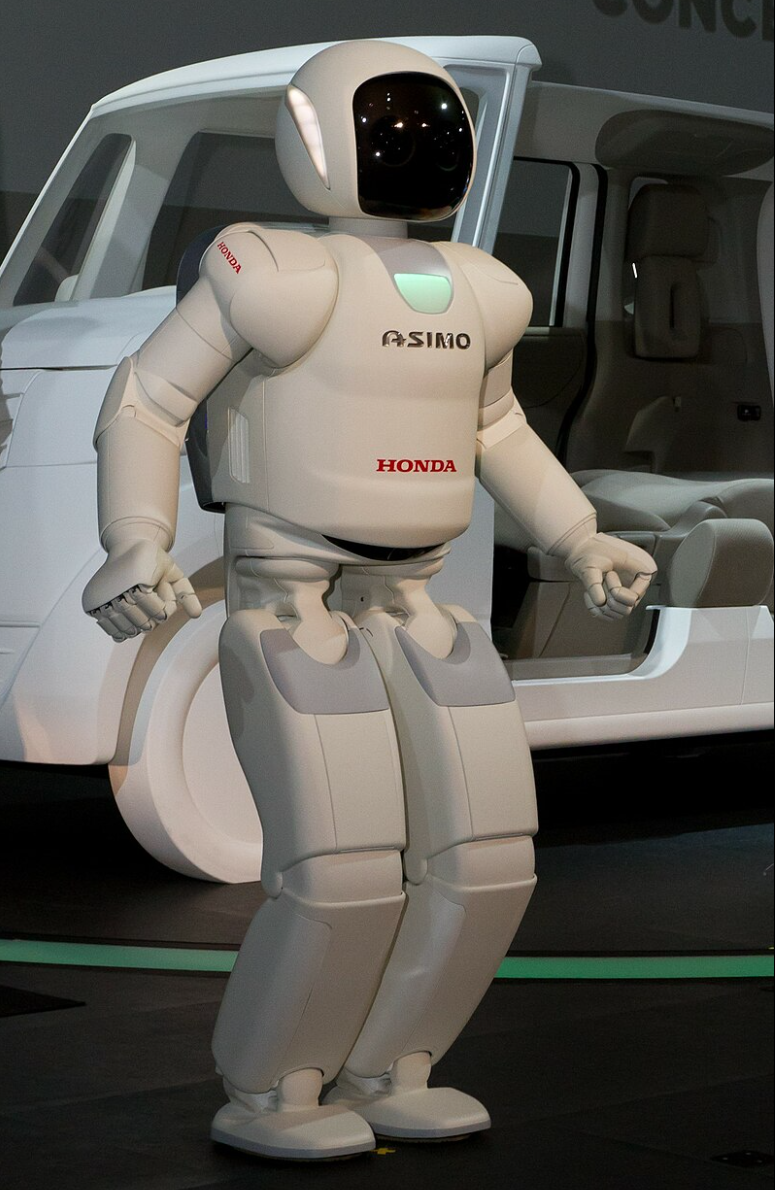 日本本田的ASIMO©wikipedia
日本本田的ASIMO©wikipedia動畫《攻殼機動隊》里有一集名為「機器們的時間」,頗為有趣。智能型戰鬥機器人塔卓克馬有著類似蜘蛛的金屬外形和完全相同的程序設定,但其中一隻因使用了天然油開始展現出個性,其他同伴也隨之覺醒。於是塔卓克馬們開始為擁有思想而惶惶不安,因為它們認識到自己之所以被允許存在是因為機器的外表,一旦被賦予人形定會招致殺身之禍,於是它們決定一起偽裝,讓自己表現得更像機器人以求自保。雖是借科幻之名,退避安全線之後的底層邏輯卻清晰可見。
但另一方面,人類從未放棄對高仿真人形機器人的追求。被美國有線電視新聞網(CNN)評為「改變世界的八大天才」之一的大阪大學機器人工程師石黑浩(Ishiguro Hiroshi)的研究一直頗受關注,在近20年里他推出的擁有年輕女性外形的Geminoid F系列和以他本人為模型的Geminoid HI系列都引發熱議。這些機器人在外觀上已經非常接近人類,在人工智能和大語言模型的幫助下,對話能力也得到了顯著提升,但在行動能力上離以假亂真還有較大距離。
石黑本人認同恐惑穀的存在,他希望找到跨越恐惑穀的方法,並認為他的機器人在局部功能上已經實現了這個目標。在外界看來,石黑浩多少帶有些瘋狂科學家氣質,但如他所言,研究人形機器人其實是探索人類本身的過程。
 石黑浩與他的雙胞胎機器人合照。©Osaka University/ATR/Kokoro
石黑浩與他的雙胞胎機器人合照。©Osaka University/ATR/Kokoro石黑的領跑展示了高仿真機器人研發是一項浩大而繁複的工程,每一個細節都可能成為恐惑穀現象的誘因。相關的探究也如抽絲剝繭一般。最初的焦點集中在機器人的外觀,主要是臉部的設計上。五官比例、皮膚顏色、表情控制都是影響因素,有研究就發現五官之中眼睛的作用最為關鍵。
目前機器人的行為尚不能做到靈活自由,許多研究指出相比個別能力突出,整體的協調性更重要。例如僅僅提高機器人的觸覺保真度並不能帶來更好的體驗,而需與視覺、聽覺等其他器官的反饋相匹配。正因如此,大多數高仿真人形機器人目前仍在世界各大實驗室里等待升級改造。
追問:本質問題抑或選擇問題?
在人形機器人從人類的幻想逐漸成為現實,即將走進日常生活的今日,森政弘於半個世紀前提出的假設依然在等待答案。但是,隨著技術的不斷髮展,人們甚至覺得離答案越來越遠,因為機器人的範疇更加寬廣,人機交互的情境也愈加複雜。
2004年動畫電影《極地特快》中飽受爭議的數字人形象提醒人們,恐惑穀現像似乎並不僅僅局限於實體機器人,元宇宙浪潮的到來意味著這個問題將進一步擴大。於是,有學者提出「恐惑牆」(uncanny wall)假設,認為恐惑穀是不可跨越的,因為隨著時間的推移,人類對技術的識別能力不斷增強,跨越恐惑穀的難度也會不斷提高,即越過恐惑穀底之後面對的將是一堵沒有上限的高牆。
然而,人類永遠不會停止對真相的追求,一邊試錯一邊積累,積跬步以行千里。人們對女性機器人索菲亞的樣貌深感失望,卻又期待下一個升級版本能帶來驚喜。畢竟科幻電影中擁有完美外表的機器人帶給了我們無限的遐想,儘管編劇們往往會給他們安排一個悲慘的結局以安撫人們對自己可能被機器人取代甚至滅絕的恐懼。
姑且不論現實中的技術何日能讓夢想成真,倘若人類尚未做好接受高仿真智能人形機器人的準備,那讓技術先行的測試無疑是在製造危機。所以,機器人的問題絕不僅僅是技術問題,技術也不是解決恐惑穀問題的唯一路徑。
恐惑穀問題研究走過的50年歷程或許在提醒我們,相比一個一勞永逸的答案,我們更加需要的是一種解決問題的智慧。將「以人為本」的理念切實融入技術開發,不再受困於問題本身,並通過思考「怎麼做」去有效迴避因糾結「是什麼」「為什麼」所造成的迷茫。因為機器人雖然是產生恐惑穀現象的最直接原因,改造機器人卻不是無可迴避的選擇。目前一部分研究已經開始調整思路,通過改進人機交互的方式來降低風險並取得了一定成效。
而作為用戶,人類自身的基本屬性雖無法改變,但對技術的認知和接受程度卻存在可調節的空間,況且用戶還可以根據各自的喜好去選擇中意的機器人。如此看來,適當的選擇可以幫助我們避免與恐惑穀問題的正面交鋒,這樣的規避策略並不可恥,還非常有用。當然這並不意味著人類在高仿真人形機器人道路上的退縮,科技的探索仍需前行,而我們也恰好需要一些時間去思考人機共存社會的合理模式。
參考文獻
森政弘. 不気味の穀[J]. Energy, 1970, 7(4): 33-35.
森政弘, 江暉. 恐惑穀[J]. 外國文學動態研究, 2020(5): 85-92.
WATSON R. Uncanny Valley—Das Phänomen des „unheimlichen Tals”[J]. 50 Schlüsselideen der Zukunft, 2014: 136-139.
ROBERTSON J. No Place for Robots: Reassessing the Bukimi no Tani ( “Uncanny Valley” )[J]. Asia Pacific Journal, 2020, 18(23).
江暉. 超越 “跨越與否” 的思考與探索: “恐惑穀” 理論五十年傳播發展綜述[J]. 外國文學動態研究, 2020(5): 98-102.
程林. “人轉向” : 為何機器人跌入的是恐惑穀而非恐怖穀[J]. 外國文學動態研究, 2020(5): 93-97.
瀬名秀明. 瀬名秀明ロボット學論集[M]. 東京: 勁草書房, 2008.
TINWELL A, GRIMSHAW M, WILLIAMS A. The Uncanny Wall[J]. International Journal of Arts and Technology, 2011, 4(3): 326-341.
GRAY K, WEGNER D M. Feeling Robots and Human Zombies: Mind perception and the Uncanny Valley[J]. Cognition, 2012, 125(1): 125-130.
CASCIO J. The Second Uncanny Valley[EB/OL]. (2007-10-27)[2024-05-28].
http://www.openthefuture.com/2007/10/the_second_uncanny_valley.html.
GAHRN-ANDERSEN R. Seeming Autonomy, Technology and the Uncanny Valley[J]. AI & Society, 2022, 37(2): 595-603.
BARTNECK C, KANDA T, ISHIGURO H, et al. Is the Uncanny Valley an Uncanny Cliff?[C]//Robot and Human Interactive Communication. IEEE, 2007: 368-373.
MOORE R K. A Bayesian explanation of the “Uncanny Valley” effect and related psychological phenomena[J]. Scientific Reports, 2012, (2): 864.
CH湯臣THAM M, SUTER P, JANCKE L. Perceptual Discrimination Difficulty and Familiarity in the Uncanny Valley: More Like a “Happy Valley” [J]. Frontiers in Psychology, 2014, 5.
本文來自微信公眾號:信睿週報 (ID:TheThinker_CITIC),原載於《信睿週報》第125期,作者:江暉(中山大學外國語學院)