智能駕駛進入下半場 無人貨運「先行一步」

作者/ IT時報記者 潘少穎
編輯/ 郝俊慧孫妍
「我們把貨裝到車上,車會自動把貨運到飛機旁,其他工作人員只要在飛機旁邊等著裝機即可。此外,遙控器還可以控制貨車的前進方向,比以前輕鬆多了。」這是首都國際機場引入由長安大學研製的無人駕駛貨運車後,為機場裝卸人員工作帶來的變化,智能駕駛貨運系統確保了貨物在複雜機場環境中的精準移動與高效對接,提高了機場的貨運效率。
不久前舉行的2024年華車展上,和智能駕駛相關的技術描繪出一幅未來出行的藍圖。
據《全球智能網聯汽車預測報告(2020—2024)》預測,今年全球出貨的汽車中超過71%的新車將搭載智能網聯繫統,市場正在日趨成熟。在華車展論壇上,不少與會專家也認為,汽車產業上半場是新能源汽車,下半場是智能網聯汽車,感知、決策、執行等環節都在進行智能化升級,實現車與車、車與路、車與人、車與雲之間的全方位互聯互通。
測試場景「隨機」可控
智能汽車的「目標」絕不能僅僅是行駛在空無一人的街道上,突如其來的行人、複雜的交通信號燈、惡劣的天氣條件……在這樣的交通環境中,智能汽車必須要作出最優決策,才能保障乘客的安全,符合人類的駕駛習慣和預期。多智能體仿真系統,正是為了模擬這些複雜多變的交通環境而誕生,簡而言之,就像智能駕駛的「超級大腦訓練場」。
為汽車、無人運輸等領域提供智能駕駛整體解決方案的北京經緯恒潤科技股份有限公司產品架構師石璐解釋說,智能體仿真系統利用多個智能體(虛擬世界中的小車、行人、交通燈等)模擬真實的交通環境,這些智能體之間會進行複雜交互,模擬出各種可能遇到的交通場景,從而測試和改進智能駕駛系統的算法。
在這個過程中,系統還具備一個強大的功能——可控「隨機」仿真,也即在仿真測試時,每次測試的場景都是獨一無二的,既有隨機性又有人為設定的可控性。這種方式可以大大提高測試的覆蓋率和效率,確保智能駕駛系統在面對各種未知情況時都能從容應對。
「請生成十字路口的智能駕駛測試場景,在此場景中,需要測試物體識別可行駛區域探測、紅綠燈。」根據對輸入語言的理解,系統會生成紅燈變綠、左轉車流、車輛闖紅燈等各種十字路口的場景。
據《IT時報》記者瞭解,在「場景規劃」中,有泥濘路面、反光路面、車道線模糊等場景,針對這些場景訓練智能駕駛車輛,並根據知識庫生成場景建議。比如反光路面會幹擾車輛對周圍環境的正確識別,因此重點在於提高視覺感知系統的魯棒性,訓練車輛識別並忽略無效信號,確保車輛能夠準確感知周圍環境並作出正確決策。
石璐介紹,基於3D重建的感知閉環仿真也是該系統的一大亮點,利用先進的3D重建技術,將真實世界的場景高精度地還原到虛擬世界中,智能駕駛系統就可以在更加接近真實的環境中測試,進一步提高其感知能力和決策準確性。

數據閉環成為核心競爭力
每一次訓練,都被悄無聲息地記錄並轉化為寶貴的數據,每一次數據的累積,都在為智能駕駛的進步添磚加瓦。
數據,打破了傳統汽車製造中硬件與軟件間的壁壘,讓智能駕駛技術能夠像生物體一樣,通過不斷「學習」和「進化」提升性能。智能駕駛車輛需要通過不斷收集、處理和分析實際行駛中的數據,來優化其感知模型和決策算法,這種「學習—反饋—優化」的循環過程,就是數據閉環的核心所在。
比如小鵬汽車的城市NGP智能駕駛系統,通過車端眾源自動建圖和實時更新機制,不僅確保了數據的自主可控,還極大提高了數據的利用效率。
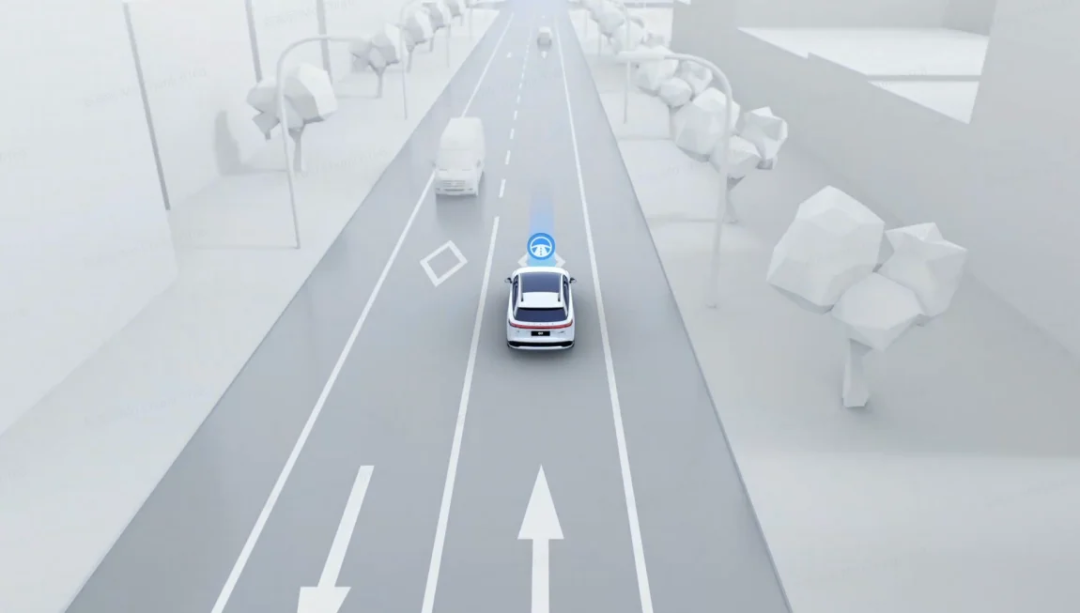
小鵬汽車的城市NGP智能駕駛系統
「如果說1.0和2.0時代的汽車由硬件和軟件驅動,那麼3.0時代的汽車將由數據驅動,從而形成智駕技術代際差。」在自動駕駛感知決策算法與數據服務商覺非科技創始人劉斌看來,當智能駕駛進入城市,建圖/數據閉環能力將成為核心競爭力,「在城市NOA場景中,智能駕駛汽車識別各種複雜的路況和障礙物,需要依靠大量的數據進行訓練和優化。而數據閉環能讓這些數據‘活’起來,不斷循環使用,從而提升智能駕駛的精度和穩定性。」
覺非科技構建了基於BEV感知結果的城市道路數據閉環方案,可以滿足城市NOA、記憶通勤、泊車和大模型訓練的需要,「我們的數據引擎有兩個特點,第一是跨終端平台的部署便捷性,第二個是與底層硬件解耦的靈活性,這也是數據中台必須具備的特點。」劉斌介紹,數據閉環需要高度自動化的數據處理流程,以確保數據在採集、傳輸、存儲和處理過程中的安全性。

無人駕駛貨運車「征服」運輸
2022年2月,中國民航局發佈的《「十四五」航空物流發展專項規劃》提到,推廣應用智能設施,例如支持智能分揀、智能裝置、智能倉儲等航空物流設施建設,鼓勵應用無人駕駛智能卡車、自動導引車、智能穿梭車、無人機等智能化運載設備。
除了首都國際機場,四川廣漢機場也和長安大學合作,在機場採用了多車協同的方式,不僅沒有降低運輸效率,而且基於自身合理規劃路徑的能力,有效避免了擁堵。
感知模塊是智能駕駛流程中的第一環,也是將物理世界與車機大腦相連接的重要一環。要推進社會物流降本增效,亟待開發新型的智能駕駛感知與決策方法。
長安大學汽車學院教授韓毅曾和團隊一起調研全國各地15家涉物流運輸企業,包括機場和港口,他表示,目前行業內存在人工依賴強、效率低靈活性低、感知弱等痛點,「比如機場倉康尼空間狹小,貨物裝卸依靠叉車,危險係數大。此外,把貨物從倉庫運至飛機,需要叉車先將貨物運至一級庫,再由轉運車運至飛機,流程複雜,管理難,效率低下。」
在韓毅看來,無人駕駛貨運市場的需求量呈現出快速增長的趨勢,但目前市場上仍缺乏針對機場、碼頭等特定場景的定製化無人貨運產品,這些場景是物流運輸的重要節點,作業環境複雜多變,對無人駕駛貨運車輛的自主導航、環境感知和避障能力等要求更高。
 圖源:pixabay
圖源:pixabay目前的無人駕駛貨運車仍保留傳統轉向結構,行進模式少且轉向半徑超過5米,不能適應機場倉康尼部的擁擠環境。而且無人駕駛貨運車的感知算法並未針對機場場景優化,無法保障貨運過程安全。」韓毅帶領團隊用激光雷達、慣性導航等構建無人駕駛貨運車融合互補的感知系統,通過多源異構數據融合算法,實現信息高效準確提取,提升了無人駕駛貨運車在不同場景的適應性。
如今,無人駕駛貨運車還應用於工業園區、港口等場景中,相關負責人表示,每台無人駕駛貨運車每天貨運量超過50噸,比人工貨運單車貨運量增長50%,且可以節省35%的成本。
排版/ 季嘉穎
圖片/ 小鵬汽車 東方IC pixabay
來源/《IT時報》公眾號vittimes