傅利葉創始人兼CEO顧捷:人形機器人沒到價格戰階段,2025年行業產量將10倍增長 | 智湧專訪
文 | 田哲
編輯 | 蘇建勳
AI大模型的加速發展,催化了國產人形機器人陸續走出實驗室,讓量產成為人形機器人新的關鍵詞。
今年以來,多家國產人形機器人公司發佈首款人形機器人產品,他們之中,最年輕的公司還不到兩歲。在傅利葉創始人兼CEO顧捷看來,這背後除了大模型的應用之外,還離不開國內高度發達的汽車、消費電子工業體系,讓人形機器人的本體得以量產。
傅利葉是國內率先量產通用人形機器人的公司之一。在推出多款康復機器人後,傅利葉於2019年開始研發通用人形機器人,2023年推出的首款雙足人形機器人GR-1,至今已在數十個場景交付百餘台。
GR-1的多場景應用,讓傅利葉聽見了客戶不同的反饋,也發現了人形機器人的不足。顧捷坦言,GR-1是一款原型機,距離完美仍然有很遠的距離。
傅利葉理想狀態的人形機器人,需要同時滿足六個條件,即運動智能、認知智能、仿生設計、靈巧作業、商業應用、用戶體驗。而讓人形機器人逐漸趨於完美,唯一方式是將人形機器人在多個場景商業化應用,吸收市場反饋不斷迭代,從而讓人形機器人真正產生商業價值。
近日,傅利葉發佈其第二款通用人形機器人GR-2,其全身自由度達到53個,單臂運動負載達3kg,能夠完成更複雜的操作。續航方面,GR-2的電池容量提升一倍,將續航時間提升至兩個小時,同時新增換電方案。
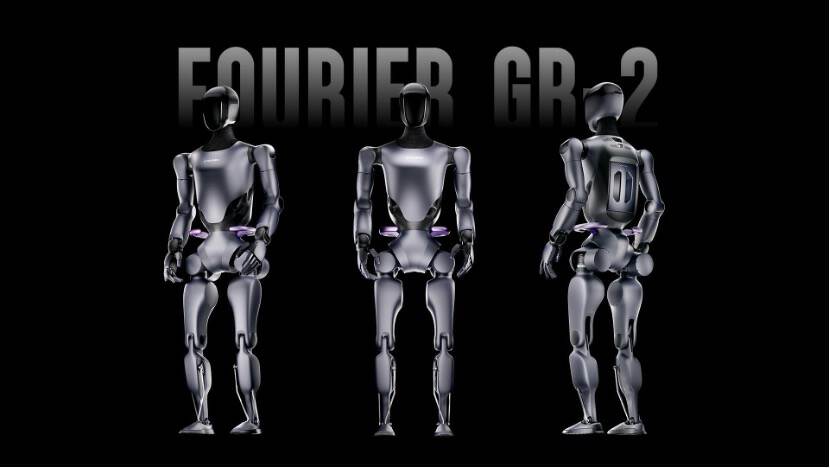 傅利葉第二代人形機器人GR-2
傅利葉第二代人形機器人GR-2外觀方面,GR-2在保留雙足、五指的設計基礎上,整體更接近人類。GR-2的身高達到175cm,體重63kg,整機佈局採用內走線設計,線纜佈置於機器人內部。顧捷解釋,將機器人設計趨向於人類,可以採集真實數據進行功能泛化,讓機器人在不同場景工作。
為了優化控制策略和性能,GR-2的關節佈置由並聯改為串聯,使得每個關節的運動可以獨立計算,有利於開發者部署控制算法,方便調試和維護,降低製造成本。
顧捷表示,自去年發佈GR-1後,傅利葉就立刻啟動第二款人形機器人的研發,GR-2正是吸收首款人形機器人應用後各方聲音的研髮結果。
傅利葉沒有設定GR-2的銷量目標,依舊小批量進行量產。顧捷認為,當下人形機器人遠遠沒有達到大批量量產階段,今年行業量產規模預計為數百台,但他預計,明年行業內人形機器人產量將同比增長10倍。
人形機器人的量產,可能會帶來行業價格戰嗎?對於這一問題,顧捷表示,傅利葉不會打價格戰,並且人形機器人行業遠未到價格戰的時期,應該更關注如何讓人形機器人產品成熟。
關於未來GR-X系列人形機器人的研發,傅利葉表示沒有一年發佈一款人形機器人的節奏,顧捷認為,需要根據行業相關技術發展程度,才能決定啟動項目時間。他相信,隨著業界的持續研究推動,將在明年看見更多大模型與機器人融合的新進展。
以下是《智能湧現》等媒體與傅利葉創始人兼CEO顧捷、傅利葉通用機器人事業部副總裁周斌的對話,內容略經編輯:
關注機器人功能,而不是局部
Q:從第一代到第二代人形機器人,研發過程中存在哪些難點?傅利葉如何解決?
A:難點在於機器人的多維度都需要同時滿足同一個要求,簡單來說就是「既要又要」。比如12自由度的靈巧手,要求它在小型化同時還需實現非常精密的動作,我們通過優化設計動作、傳動結構等方面,最終實現了小型12自由度的靈巧手。
從商品角度設計,靈巧手需要和整個機器人外殼結構無縫連接,需要跨模塊思考,這是我們一直面臨的技術難點。因此,我們按照整個項目設定大將多個團隊融合為大團隊一起研發,把機器人整體作為一個產品進行設計。
Q:第二代機器人的電池有哪些方面的升級?
A:根據GR-1在交付後客戶的反饋,我們將GR-2的電池容量提升了超200%,並且可拆卸進行換電補能。
未來,傅利葉會和電池頭部企業合作開發機器人電池。因為電池對我們來說只是一個模塊,我們會採用最先進的商業可用技術應用至整個系統。
Q:GR-2的研發週期多長時間?
A:從去年發佈第一代之後,我們就開始策劃第二代性能指標達到SPEC,花了大概半年的時間,結合客戶反饋、製造工藝搭樣機。直到現在GR-2的樣品出現,共有三個GR-2的形態迭代,過程中根據彙總的經驗和反饋,進行了一些修改。
Q:GR-2發佈後,下一代產品是否即將啟動研發?
A:研發是一個滾動的過程,今天發佈的人形機器人是GR-X系列,包括GR-1、 GR-2等其它系列產品,下一代GR-X系列產品留個懸念。
我們沒有嚴格按照一年發佈一款的節奏設定研發週期,因為現在的技術迭代和技術突破有自己的節奏,我們希望技術成熟一代,傅利葉發佈一代人形機器人,相當於這一代人形機器人基本達到了我們目前所有的客戶的需求,以及我們調研的認知高度,我們選擇最可靠、最穩定的量產的工藝技術定義了一款當前的產品。
但是研究中的很多技術超前不少,比如我們之前在研究端到端感知,包括後面可能考慮有更大的算力、新材料,我們會多方面預演,之後才能按照時間節點排下一代的產品時間。
Q:智能化方面,傅利葉如何訓練?
A:傅利葉的人形機器人沒有AI的概念,我們側重於將機器人本體的潛能和應用性能做好。算法層面,我們會進行組成算法調試,也會聯合知名院校、AI公司研究、開發。
Q:傅利葉從首個研發方向是醫療機器人,到現在研發通用人形機器人,傅利葉的競爭優勢是什麼?
A:現在大家關注人形機器人的活動自由度,傅利葉更關注提升機器人的功能,而不是機器人本身。就像一個人類可以參加奧運會,也能做普通的工作。我們更加關注機器人整體的運動智能、認知智能、仿生設計、靈巧作業、商業應用、用戶體驗六個方面,這樣的機器人才是好機器人。
2025年行業內人形機器人產量將提升10倍
Q:包括GR-1在內,你對目前這兩款產品今年或明年的整體銷售目標有預期嗎?
A:目前計劃是小批量量產人形機器人,還遠遠沒有達到大批量量產階段。今年整個行業量產規模我認為是是數百台,但是一些產品具有複製性,明年行業人形機器人產量能夠以10倍速度增長,具體的量現在難以預測。
Q:人形機器人逐漸走向量產,相關零部件供應鏈近兩年是否發生變化?
A:人形機器人的量產成本無論是10萬元還是20萬元,對於現有行業來說的影響都不明顯,我們希望機器人量產後能達到產品級,有用且可靠。
人形機器人的供應鏈和汽車行業高度相似,大約40%零部件接近消費電子,因此消費電子、電動汽車供應鏈的良好基礎,讓中國機器人產業領先,能讓未來的人形機器人產品價格低至消費者買得起,但這個前提是人形機器人足夠有用,目前人形機器人行業發展還沒達到第一步。
Q:觸控單元作為一號部件容易導致成本增加,傅利葉在這一方面有何降本方式?
A:觸摸傳感器單元可拆換,所以我們考慮的主要成本是加工和耗件成本。我們將整個觸覺傳感器的接口統一化,以方便拆換。另外,由於觸覺傳感器有差異,因此只要統一接口,就能更替手指等零部件。
Q:不同場景對於機器人手指可能有不同要求,傅利葉未來可能推出二指、三指的機器人嗎?
A:從通用人形機器人角度看,我們不會做二指、三指,因為人的手指是五根手指,從業務操作泛化性來看,五根手指的人形機器人可以像人類般操作,從而採集真實數據進行泛化,這條路線能夠讓機器人更接近人類。傅利葉推出統一化的接口,客戶可以針對應用需求,自己添加模塊。
Q:傅利葉的人形機器人技術路線是怎樣的,與其他廠家有什麼差異?
A:我們的機器人是「Made for AI」的這樣一個概念,會更加側重把機器人的本體做好,把它本身的潛能、活動度、運動性能做紮實。
算法層面上,我們自己會做一些底層的算法調試,另外和一些知名院校聯合開發,與一些公司合作來進行實現。所以基本上一些最前沿的,包括有突破性的最新的算法架構、訓練方式,在我們本體上都在做相應的部署和實踐。而且所獲得的一些成果也是非常令人驚奇的。
Q:傅利葉的人形機器人已經在銀行、工廠等多個場景應用,傅利葉如何分配人力?
A:人形機器人落地效果最明顯的是回報率高場景。比如某個場景有痛點卻沒得到滿足,需要根據客戶需求定義人形機器人的功能優先級。
技術指引未來機器人的發展方向,如果脫離大量技術去滿足客戶需求,對於我們來說只是一個短期利益;如果著眼長期技術方向,需要大量實驗室和頂尖的研發團隊確定技術方向,這是不緊急卻非常重要的工作。
緊急、重要且能立刻落地的場景,需要一部分工程化能力,迅速滿足客戶需求。這其中,長期看技術判斷,根據客戶需求快速輸出、反饋、迭代。
Q:不同場景的應用,對傅利葉機器人的迭代有哪些幫助?
A:機器人在應用中產生的數據儲存在客戶的服務器中,這些數據未來會成為各企業自己的資產,企業可以根據內部數據研發AI Agent。傅利葉做AI Agent本體,相當於身體和大腦。客戶和第三方合作數據歸屬於客戶,他們基於數據進行配置和訓練,我們提供工具鏈和方法論。
我們會建設數據採集的訓練中心,完成部分數據閉環。另外我們將任務中單獨採集的數據集,結合網絡公開數據、仿真數據集進行混合訓練,進而完成部分具體任務。
端到端大模型融合機器人,將在今明兩年有新進展
Q:上半年人形機器人出現了類似價格戰的情況,下半年的競爭可能會激烈,傅利葉怎麼應對?
A:首先傅利葉不打價格戰,其次人形機器人行業目前還遠遠沒到價格戰的時期。
舉個例子,假設人力成本一個月一萬塊,買一台售價一萬塊的人形機器人回家,你會問這款機器人能為你做哪些事情。我們更應該注重讓人形機器人產品成熟,能夠落地完成某些工作,產生真正的商業價值,而不是一開始就關注價格。
Q:機器人技術或產業方面,傅利葉面臨的挑戰是什麼?
A:通用機器人只有將身體和大腦結合使用,才能產生作用。大腦方面,現在大模型能夠識別圖片、聊天,但沒有具象化的生成能力。而機器人身體成本高昂,精度有限,也很難執行動作。
現在通用機器人應用場景近百個,總結起來存在的應用問題可分為七大類,因為機器人的大腦和身體能力不足,但場景問題未來會被逐漸解決。
Q:大模型與機器人結合,如何推動機器人發展?
A:最近半年我們看到不少的文獻,可以通過大模型生成動作,讓機器人做一些簡單動作。另外,也可以通過強化學習讓這個機器人學會一些反應要求很高,動作要求很快的動作,這些放在以前不敢想像。
現在機器人有50多個自由度,50多個電機,以前控制每個電機,要向每一行髮指令。如果是全身運動控制,每一刻、每一秒都是不同的位置,不同力量的變化,通過傳統編程控制簡直是一個不可能完成的任務。
現在通過大模型,一個神經網絡就可以控制人形機器人,而且機器人的動作可以產生一些意想不到的東西,因為是它自學的。你給它做了一些示範,它可以模仿學習,你給了它一些獎勵函數,它可以通過強化學習快速反應。通過大模型直接給它一張圖片,可以讓它根據圖片闡釋下一個坐標的動作。目前,這些分塊已經有非常頂尖的大佬和實驗室研究。我們覺得大模型與機器人融合在今明兩年能夠看到更多進展。
Q:目前國內的機器人公司更多相信大模型+小模型路線,為什麼傅利葉會選擇端到端這條看起來「非主流」的技術路線?
A:我們覺得對於最底層的來說,比如說控制電機發力,首先就能夠做一個位置。舉一個例子,這時候用傳統算法比如 PID算法以及控制算法,容易解決單個問題。
如果要做一些運動控制條件反射,或者實現走路等複雜動作,通過神經網絡模仿學習、強化學習,這些方式能夠讓機器人達到一個非常好的精確運作,穩定度也比較好。
但是再往上,如果說是要真正意義完成一個複雜任務,我們覺得端到端的可能性還是最大的。端到端原本是一個小眾技術,但現在端到端在自動駕駛領域變成了主流認知。人形機器人其實也一樣,原大家看到的是傳統任務規劃,軌跡控制,這些東西都是人形機器人的底子。現在我們更想嘗試端到端方案,解決原來的任務複雜度。
Q:機器人和自動駕駛發展相似,隨著產品智能化不斷提升,不少公司自研零部件以跟上智能化需求。傅利葉已經自研部分核心零部件,未來是否會自研芯片等關鍵零部件?
A:我們對人形機器執行器的關鍵模組是全自研,比如電機、減速機、驅動器、傳感器等,目的是讓整個機器人適配性能夠達到最好。
目前芯片不在自研計劃之內,但是未來不排除這個可能。我們覺得芯片性能會大大影響整機性能,我們可以把很多邊緣側計算放在執行器側,很多算力放在本地。就像特斯拉FSD的大量計算在本地完成,大型服務器集群放在雲端,通過連接雲端完成複雜問題,需要高速響應的問題在本地解決,所以芯片的需求量未來會很大。
Q:芯片算力未來會多大?
A:算力越大,支撐的神經網絡越大,理論上模型越大,機器人的知識儲備量越大。目前算力瓶頸是,人形機器人的身材比較苗條,不能裝上很多算力板。按照半導體發展情況,未來幾年芯片算力可能提升十倍、百倍。
Q:人形機器人未來的終局會是什麼?
A:現在有兩種觀點,一種是認為人形機器人行業將像國內電動汽車品牌,很多廠家有著不同的品牌,產品有不同的定位和價格,機器人行業生態豐富。另一種觀點認為,可能會出現安卓、iOS般的巨頭,具備一定AI能力。我們認為兩種情況都有可能實現,傅利葉希望能推動機器人產品化,實現真正意義的產品泛化性。



















