人形機器人下一站:從工廠到家庭,它們將學會「察言觀色」
4月13日,人形機器人半程馬拉松將在北京亦莊鳴槍開跑。當機器人像人一起走上運動賽場、走進工廠開啟「職業生涯」、走上舞台開啟首戰,公眾對人形機器人的發展充滿更多期待。與此同時,研究者們正加大對人形機器人情感、視覺、觸覺等領域的大模型研發,為人形機器人走進家庭、醫療機構等服務場景提供可能。
讓機械臂像人一樣「溫柔」地傳遞物體
當機器人能夠對人類的情感做出正確反饋,並給足情緒價值時,人類也許會真正擁有一位新朋友。北京大學計算機學院情感與認知智能機器人實驗室主任、研究員王韜帶領團隊成員為具身智能研發情感大模型,讓機器人對人類情感進行正確反應。
走進實驗室,彷彿走進機器人的訓練營,這裏不僅有網紅機器人「天軼」、在蛇年春晚上大放異彩的宇樹機器人,還有實驗室自主研發的機器人算算、小翅膀等。
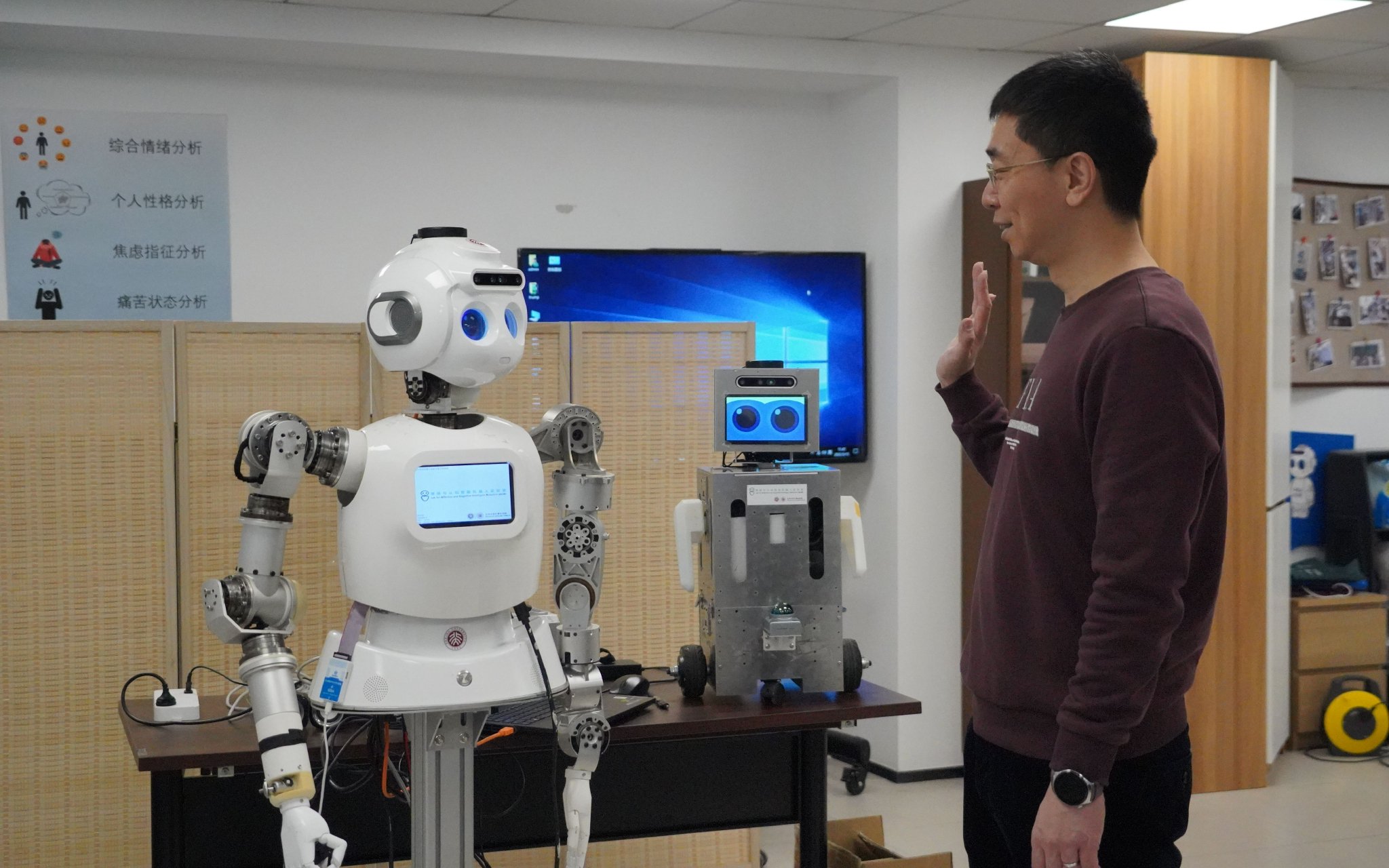 北京大學計算機學院情感與認知智能機器人實驗室,王韜與搭載了具身智能情感大模型的機器人「算算」交流。新京報記者 王巍 攝
北京大學計算機學院情感與認知智能機器人實驗室,王韜與搭載了具身智能情感大模型的機器人「算算」交流。新京報記者 王巍 攝為了更好地訓練機器人具備交互能力,王韜在實驗室里設置了一間交互實驗區。這裏用綠幕圍起來,四周放置了兩組布藝沙發、一台咖啡機和一台洗衣機,「演員」是固定在場地中央可移動機器人骨架上的一條機械臂。記者嘗試隨意坐在沙發的任意區域,或者站立、蹲下,機械臂都可以將咖啡杯「溫柔」地遞到記者手上。
機械臂的傳遞動作更像人的動作,而且它能根據記者的位置遞送咖啡杯。王韜說,經過「特訓」,機械臂可以避免奇怪的行為和動作,「我們希望未來走進家庭的機器人主動、自然地向人類傳遞東西,而不是像現在的很多機器人一樣,被動地站在那裡等待人類從它手中取走東西。」
王韜介紹,交互實驗區有三項實驗任務,一是機器人與人的非接觸式交互,比如人向機器人打招呼,機器人如何回應。二是人與機器人通過物體交互,比如遞杯子,「機器人發現人在什麼情況下需要杯子,如何更自然地將杯子交給人;人拿到什麼程度,機器人應該放手。」
三是機器人與人有物理交互。舉例來說,兩個人見面握手時,握手的力度、方向、高度以及手的上下晃動都非常自然,互相能夠感受到對方的真誠。但在現階段,機器人與人的握手顯得「笨拙」,多為機器人將手伸到固定的高度和位置,人再伸手與其握手,但這樣的握手生硬,且機器人的握手力度是固定的。
「在科幻片里,機器人與人擁抱,機器人溫暖地拍一拍人的頭,現階段,這樣的場景如果發生在現實生活中,會非常危險。」王韜解釋說,目前,機器人不知道用什麼力度擁抱人類,擁抱得太輕顯得刻板、僵硬,擁抱力度過大則可能對人類造成傷害。因此,王韜和團隊的研究方向正是通過多次訓練,讓機器人與人的交互更具溫度和感情。
讓機器人擺脫遙控器
「算算」是王韜團隊自主研發的一款搭載了具身智能情感大模型的機器人,它的觀察十分細緻,能在與人聊天的過程中實時檢測人的表情/微表情以及心率變化,識別人的注意力情況,還能分析人的人格性格特性,提供更具針對性的情感互動。
比如,當研究人員和算算「「抽水」」工作壓力大、心情焦慮時,算算認真詢問研究人員的工作情況、觀察他的各種狀態,並給出暖心回應:「你近期有焦慮情緒很正常,這是身體在提醒你要多關照自己……」王韜說,讓機器人具備察言觀色的能力,需要以情感和認知技術作為支撐。「我們研發情感認知技術或模型的目的,是讓機器人變得更聰明、更有情商,更好地為人服務。機器人最終需要服務人,要實現這一目標,情感和認知技術無法迴避。」
實驗室里還有各種各樣機器人廠家提供的遙控器,它們是機器人「入營」前的標配。「入營」訓練後,機器人將擺脫遙控器,根據任務需求,自主、智能地移動,還可以通過「聽」或「看」跟著人走,這些都為機器人走進家庭奠定基礎。
以「天軼」為例,「天軼」不僅能聽從指令自行移動到指定地點,還能進行跟隨行動——只見研究人員拿出印有二維碼的小旗,接收到出髮指令的「天軼」會「看」著小旗前進,還能完成躲避障礙物、轉彎等動作。不久前,研究人員還將「天軼」帶出實驗室,在校園里溜躂。「現在機器人還是跟著二維碼小旗,很快它就能不用看二維碼,直接跟著小旗走了。」王韜介紹。
不過,「天軼」也有淘氣的時候。記者採訪時,「天軼」在沒收到指令也沒有標誌小旗的情況下,自顧自地在實驗室里溜躂起來,還避讓了其他機器人。見此情景,王韜笑著提醒同事:「大家檢查下原因,我們不僅要知道怎麼讓機器人擺脫遙控器,也要知道它意外自主運動的原因。」
追問1:具身智能發展面臨哪些瓶頸?
擁有更接近人類情感、思維的人形機器人何時能走進千家萬戶?專家學者就此分享了各自的觀點。
上海交通大學力學系副教授馬道林認為,目前具身智能行業處於早期發展階段,「實驗室研究已經能夠向工程落地遷移,不過並未完備地解決工程落地面臨的全部問題。」如果以人的成長來類比人形機器人的發展,馬道林認為,現階段有些人形機器已經站起來學會走,但有的走不穩,有的還不會跑,「整體來看,人形機器人還是一兩歲的小孩子。」
北京大學計算機學院前沿計算研究中心助理教授、研究員董豪認為,具身智能的「大腦」已經是中學生甚至大學生水平,「具身智能能夠用海量的互聯網數據來訓練‘大腦’,但其‘小腦’訓練不足,尚處於嬰兒時期。」
日前,北京人形機器人創新中心發佈了全球首個通用具身智能平台——慧思開物。在當天的發佈會上,創新中心總經理熊友軍表示,具身智能行業發展面臨瓶頸和製約。
第一個瓶頸體現在本體性能方面。「目前有的機器人移動能力較差,速度較慢,只適合在平地或有限的環境中運行。」還有的機器人可靠性和穩定性較差。「我們經常看到機器人可以跳舞、表演,但是要真正讓它長時間可靠運行,比如跑馬拉松,可能會面臨關節發熱、摔倒等平時想不到的問題,這些都是本體性能不完善的體現。」
第二個瓶頸是具身智能數據的缺乏,尤其是高質量具體數據。第三個瓶頸是機器人泛化能力較低。也就是說,機器人或具身智能在單一環境、任務中有較好的表現力,但是若環境發生變化,比如從商業環境轉變為家庭或工業環境,機器人可能會遇上新問題。
針對上述問題,北京人形機器人創新中心推出一系列解決方案,比如發佈通用機器人平台——天工,並對架構體系進行多次升級迭代。在數據稀缺方面,創新中心發佈了首個具身智能數據集方案,計劃建立人形機器人世界上規模最大、信息最稠密、最通用的高質量具身智能數據集。
追問2:服務家庭,人形機器人還要具備哪些技能?
目前,已有越來越多的人形機器人到工廠「打工」,多台、多場景、多任務的人形機器人協同實訓展開,將推動工業人形機器人從單機自主向群體智能進化。工作場景從工廠轉向家庭,人形機器人還需邁過哪些門檻?
王韜認為,目前人形機器人的運動、控制能力出色,最需要解決的是讓機器人瞭解站在它對面的人在想什麼、需要什麼、如何主動自然地進行服務,這就是機器人與人的交互能力。「當面對服務型人形機器人時,我們總會希望像與人交流那樣和機器人溝通,這就要求機器人具備交互能力,瞭解人的想法,以便更好地服務於人。」
馬道林認為,人形機器人在硬件設計方面仍有很大改進空間,也有較大降本空間。要實現智能控制,需要在AI算法、訓練AI模型方面持續發力。目前,人形機器人最基本的技能是用腿或輪子「走路」,這是它的運動能力。「如果按照我們期待的那樣,讓人形機器人具備完備的工作能力,它們還需要擁有一雙能夠靈巧、精細控制的手。我認為,手上的作業能力是具身智能人形機器人落地的關鍵,也是行業發展的終極競技場。」
熊友軍表示,人形機器人最終應該在國民經濟和國計民生方面發揮重要戰略價值。「它需要融合手、眼、腿、腦的能力,不僅可以在危險、有毒、有害或者人不願去的地方發揮價值,還需要升級人機交互、感知、意圖識別、執行規劃等各方面的能力。」
追問3:未來的人形機器人什麼樣?
多位專家學者表示,具身智能發展迅猛,現在的人形機器人正從蹣跚學步走向穩步前行。在其「骨骼」、大腦、小腦更加完善的同時,研究者們正同步賦予機器人像人一樣的身體機能。
未來的人形機器人什麼樣?馬道林認為,目前大多數人形機器人尚未具備良好的觸覺感知和觸覺控制能力,「具身智能要將AI和機器人結合起來,關鍵在於讓機器人能夠自己感受周圍的三維物理世界。」感受三維物理世界包括兩大感知模態,即視覺和觸覺,目前絕大部分機器人僅能解決「看」的問題,對於感受周圍的物理世界還處於非常早期的階段。
馬道林從事具身智能的觸覺感知研究,「現在,我們將觸覺傳感器和觸覺感知的研究推進到與人的感知能力相近,甚至個別指標可以超越人的感知能力。從這個意義上講,我們的觸覺研究已經做好讓機器人實現應用的準備。」
觸覺對於走進家庭、醫院、養老院的人形機器人有多重要?舉例來說,機器人攙扶病人、老人,如果沒有靈敏的觸覺,就無法感知應該用多大的力度,可能會用力過猛讓人受傷。再比如,人形機器人給家裡各類電器插電源時,需要觸覺去感知細微變化,否則很容易插不準,導致電源損壞。下一步,馬道林將研究讓機器人能靈敏地感知溫度。
在王韜的研究中,機器人被賦予了情感大模型,它們更加聰慧、善於觀察。它可以是傾聽者、心理療愈師;可以根據人的情緒和性格調整做事風格,讓人更感溫暖;可以是全能的家政服務人員;還可以是商業領域的好助手、服務行業的好客服、安全領域的好專家。「從人類的期待來說,人形機器人研發應該從對人服務和交互角度多發力,如果我們不把對人服務和交互納入機器人訓練大模型,最終就無法擁有真正的服務機器人。」王韜說。
新京報記者 吳婷婷
編輯 白爽 校對 薛京寧