研發具身智能行業應用模型,「木牛機器人」想成為機器人行業的高通丨早期項目
作者|常敏瀟
編輯|邱曉芬
「木牛機器人」是一家專注於具身智能行業應用模型研發與應用的技術公司,通過結構化、模塊化架構和一體化設計,自主構建獨立的感知、規劃、驅動與控制協同的 AI 機器人通用技術底座。
「我們希望將「木牛機器人」打造成機器人行業的「高通」,通過構建通用機器人平台系統,即具身智能行業應用模型,實現機器人本體和需求場景適配,從而以不同形態的機器人來完成不同場景的任務。」 「木牛機器人」CEO郭林表示。
為此,「木牛機器人」打造了予智具身智能行業應用模型MN-LLM,在機器人本體搭建通用平台,解決機器人本體在不同場景下進行商業化應用的問題。
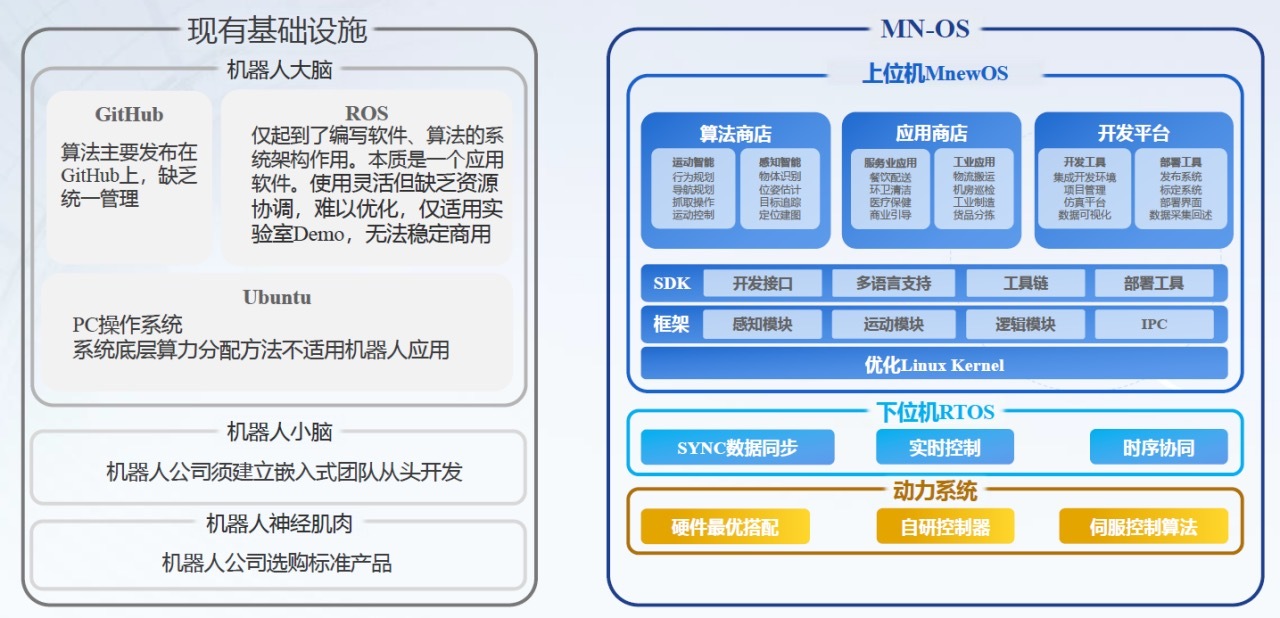
在技術自主研發過程中,「木牛機器人」首先對機器人的本體能力進行抽像概括,將其抽像為感知能力、推理能力、決策能力、規劃能力、控制能力和數據訓練能力。
其次,再分解對應為大腦即上位機進行決策和規劃;小腦和神經即下位機進行規定任務分解;基於執行器,構建統一執行系統,類比為機器人的肌肉和骨骼進行一體化編程設計。
最後,在此基礎上,將統一抽像的機器人感知能力、路徑規劃能力,執行性控制能力等模塊化,以滿足在任何場景下,機器人的調用需求。
 「木牛機器人」供圖
「木牛機器人」供圖基於該行業應用模型,機器人程序的開發週期縮短,代碼總量減少,不同程序之間代碼的複用率增高,且對開發人員要求大幅度降低,使得機器人的開發速度更快,開發成本更低,且有更好的協調性和安全性。
目前,「木牛機器人」在予智具身智能行業應用模型的基礎上正選戰略產品無人平衡重叉車,初步應用於造紙廠和紡織廠等需要大量重物搬運、裝卸車等應用場景。
 「木牛機器人」供圖
「木牛機器人」供圖造紙廠通常處於室外和半室外的生產環境,實際環境中的光線、氣候、溫度的差異都會影響到無人平衡重叉車的抓取、操作和擺放的精準度。
 「木牛機器人」供圖
「木牛機器人」供圖此外,在重物運輸過程中,車輛通常是非標準化的,需要機器人本體實時根據車輛所在位置進行即時性判斷。
無人平衡重叉車需要同時滿足5噸大重量,4m/s快速度和釐米級高精度等多方面的要求,在非標準化的作業場景下,無論是車輛還是碼垛的位置、角度偏移,都會影響機器人建模的準確程度。
 「木牛機器人」供圖
「木牛機器人」供圖「叉車市場是一個巨大且成熟市場,每年有110萬台以上的銷量。其中平衡重叉車是最集中的產品類型,佔到整體市場銷售額的60%,且每年還有20%的增長率」。
談及將具身智能行業應用模型運用到叉車上,「木牛機器人」CEO 郭林解釋道,無人平衡重叉車能大量應用於工業生產廠區內重貨轉運中,具有很高的場景泛化可能性,能夠覆蓋諸多應用場景。
目前,「木牛機器人」已與造紙行業智能製造系統和智能倉儲物流系統的龍頭企業–中輕長泰(市場份額超過80%)、國家工業互聯網應用創新體驗中心(紡織行業)-江蘇格羅瑞科技等眾多領域的智能製造節點型企業深度合作。
團隊方面,「木牛機器人」員工超過50人,團隊核心研發成員主要由來自美國波士頓動力公司、NASA(美國航天局)、DARPA(美國國防高級研究計劃局)等頂尖實驗室科研人員組成;公司經營管理人員由前平安集團、百度、美團等公司高管組成,高新技術人才佔比超過90%。
「木牛機器人」CEO郭林表示,我們切入機器人賽道,發現行業技術基礎設施缺失,需求離散,機器人開發麵對眾多無法通用的實際場景。此外,懂技術的人又離市場太遠,產品不匹配需求,這些矛盾,導致開發成本和部署實施成本極高。
為此,「木牛機器人」通過構建機器人行業應用模型的技術突破和產業深度合作的商業模式創新,實現機器人本體和需求場景適配,以不同形態的機器人來完成不同場景的任務。



















