李飛飛吳佳俊團隊新作:推出具身智能決策能力評價基準,o1-preview登頂 | NeurIPS
基爾西 發自 凹非寺
量子位 | 公眾號 QbitAI
大模型的具身智能決策能力,終於有系統的通用評估基準了。
李飛飛吳佳俊團隊新提出的評估框架,對具身智能決策的四項關鍵子能力來了個全面檢查。
這套基準已經被選為了NeurIPS數據和測試集(D&B)專欄Oral論文,同時也被收錄進了PyPI,只要一行代碼就能快速調用。
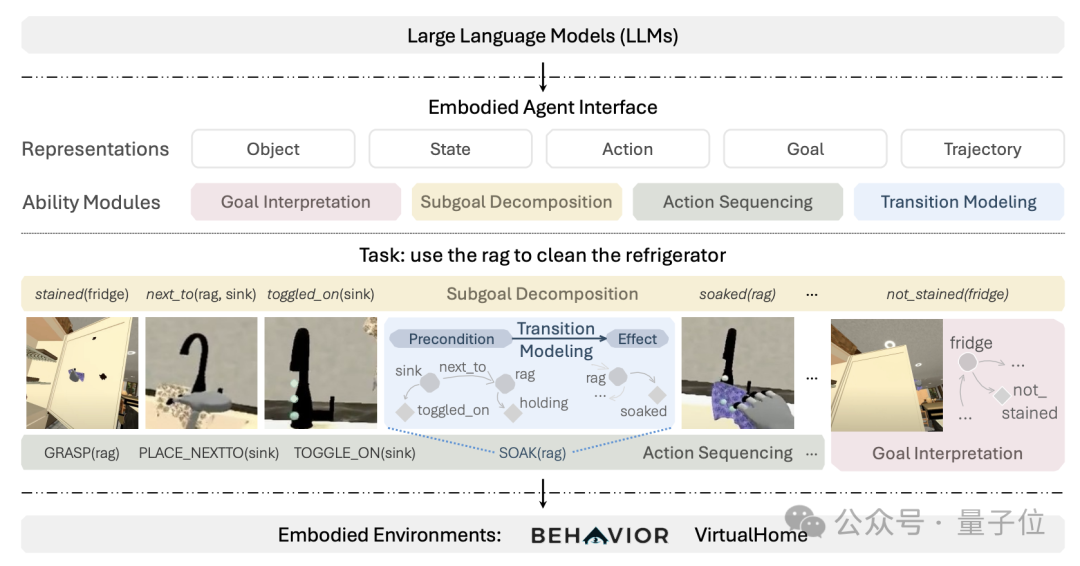
該框架名為Embodied Agent Interface(簡稱EAI),提供了連接不同模塊和基準環境的標準接口。
利用這套框架,作者對18款主流模型進行了測試,形成了一篇超百頁的論文。
測試結果顯示,在已公開的大模型當中,o1-preview的綜合成績位列第一。
李飛飛本人表示,對這項合作研究感到非常興奮。
有網民評價說,這項成果為大模型具身智能決策塑造了未來。
四項子能力全面評估
首先,EAI提供了一種統一的目標表示方法,能夠兼容不同類型的目標,並支持複雜約束的描述。
團隊認為,現有的具身決策任務通常針對特定領域設計目標,缺乏一致性和通用性。
例如,BEHAVIOR和VirtualHome都是具身智能體的評測基準和模擬環境,用於研究智能體在複雜環境中完成任務的能力。
但二者又有所區別,BEHAVIOR使用基於狀態的目標,而VirtualHome使用時間擴展的目標。
EAI則通過引入線性時態邏輯(LTL),實現了目標表示方式的統一,提高了模塊之間的互操作性,便於比較不同模型在同一任務上的表現。

在具體的評估過程當中,EAI採用了模塊化的評估方式,並將評估指標進行了更細粒度的劃分。
以往的研究通常將大模型作為整體進行評估,很少關注其在具身決策各個子任務上的表現;
同時,這些現有基準通常只關注任務的最終成功率,很少深入分析模型的錯誤類型和原因。
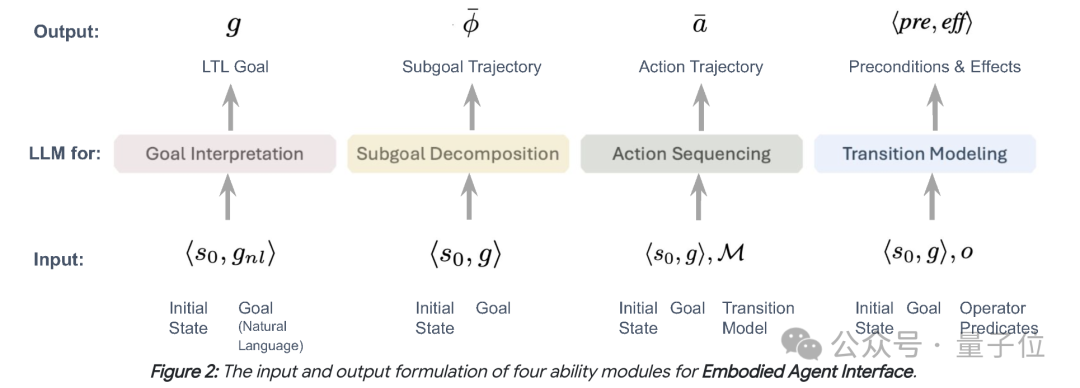
為了更深入理解大模型的行為模式和優劣勢分佈,EAI提出了四個關鍵能力模塊,並設計了一系列細粒度的評估指標:
-
將模型能力分為四個關鍵模塊;
-
定義了清晰的輸入輸出接口;
-
從軌跡可執行性、目標滿足度、邏輯匹配性等多個角度評估模型的性能;
-
引入了豐富的註釋(如目標狀態、關係、動作),以實現自動化的錯誤分析。
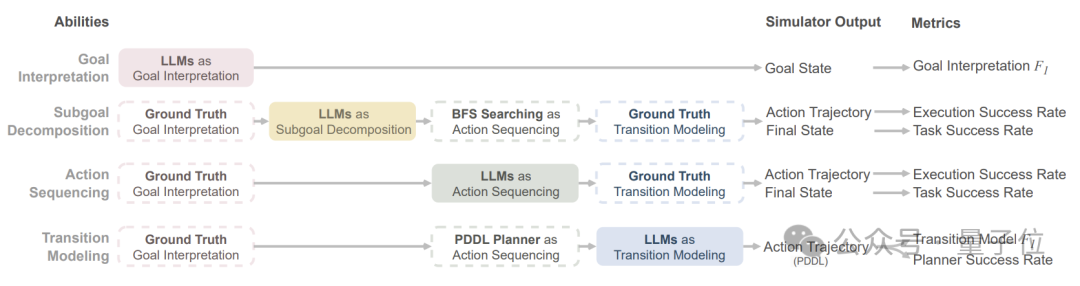
具體來說,四個關鍵模塊及內容分別是:
-
目標解釋(Goal Interpretation):將自然語言表述的任務目標轉化為形式化的LTL目標公式;
-
子目標分解(Subgoal Decomposition):將任務目標分解為一系列子目標,每個子目標也用LTL公式表示;
-
動作序列規劃(Action Sequencing):根據任務目標生成動作序列,在環境中執行以達成目標狀態;
-
轉換建模(Transition Modeling):為每個動作或操作符生成前提條件和效果,形成環境轉換模型。
另外,EAI選取了兩個具有代表性但特點迥異的環境,也就是前面提到的BEHAVIOR和VirtualHome。
相比於單一環境評估,EAI更能考察大模型跨領域的泛化能力,有助於全面理解其適用範圍和局限性。
o1-preview綜合成績第一
利用EAI這套標準,研究團隊對GPT、Claude、Gemini等18款主流模型(型號)的決策能力進行了評估。
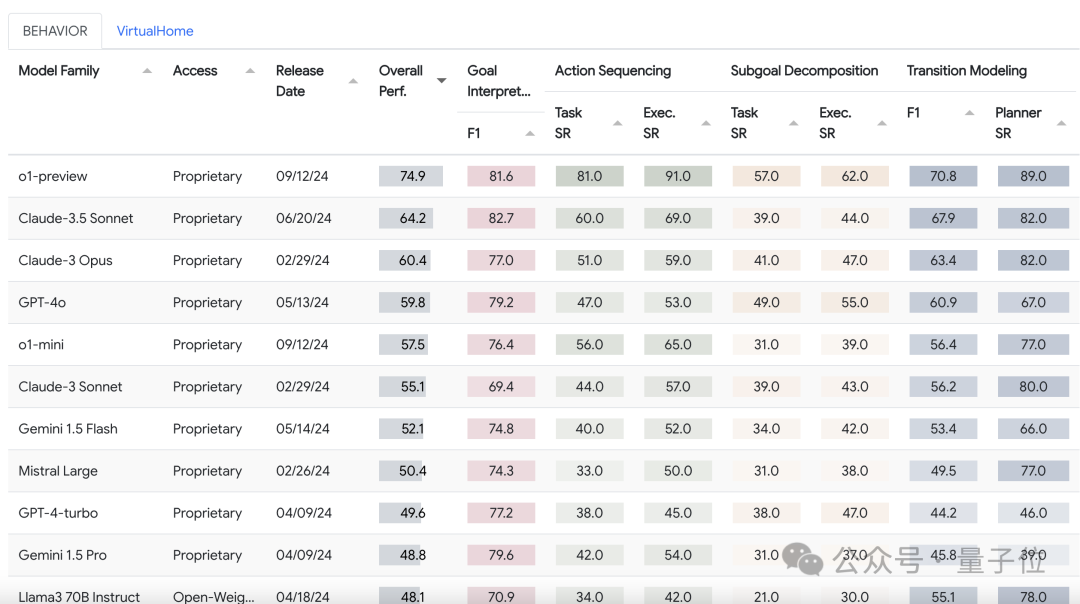
在BEHAVIOR和VirtualHome環境下,o1-preview均獲得了排行榜綜合成績第一名。
其中在BEHAVIOR環境中,o1-preview得分為74.9,比第二名的Claude 3.5 Sonnet高了10多分,排在之後的是60分左右的Claude 3 Opus和GPT-4o。
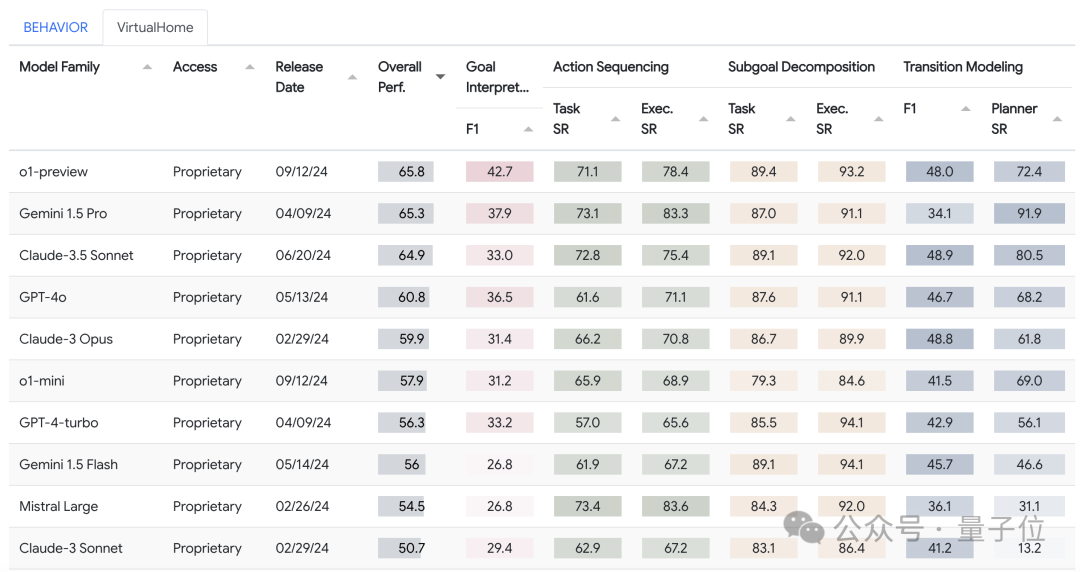
到了VirtualHome環境下,依然是o1-preview領先,但前三名的成績相對接近。
同時Gemini 1.5 Pro變成了第二名,不過整體來看排行靠前的幾個模型和BEHAVIOR環境類似。
當然如果比較單項能力,不同模型也體現出了各自不同的優勢項目。
比如在BEHAVIOR環境中,總分排第二的Claude 3.5 Sonnet,目標解釋能力略高於總分排第一的o1-preview。
在VirtualHome環境中,總分相對靠後的Mistral Large,在動作序列規劃上取得了第一名。
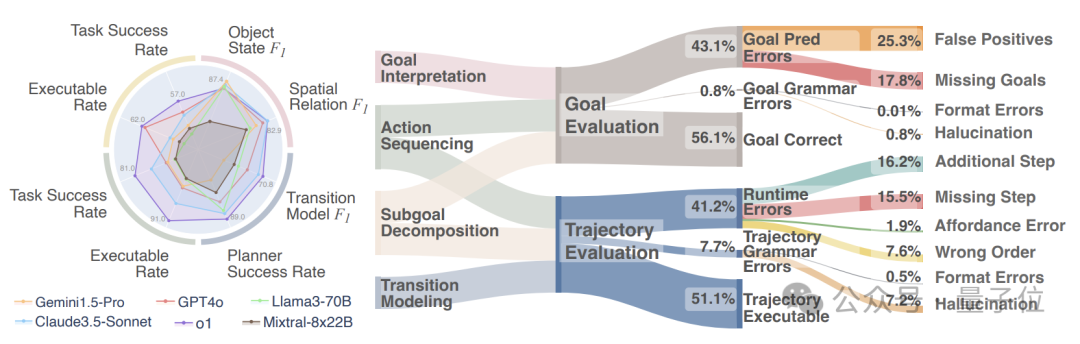
作者還對各模型的失敗情況進行了深入分析,發現了將中間狀態誤識別為最終目標狀態、對隱含的物理關係理解不足、忽略重要的前提條件等具體問題。
這些發現能夠讓研究人員對模型的優缺陷進行更深層的瞭解,為之後的研究提供了重要參考。
項目主頁:
https://embodied-agent-interface.github.io/
論文:
https://arxiv.org/abs/2410.07166
代碼:
https://github.com/embodied-agent-interface/embodied-agent-interface
數據集:
https://huggingface.co/datasets/Inevitablevalor/EmbodiedAgentInterface