貓貓運動方程,首次被物理學家破解! |《美國物理學雜誌》正經研究
白小交 西小風 發自 凹非寺
量子位 | 公眾號 QbitAI
貓貓和人的交互行為,竟然被物理學家用方程式寫出來了!
其成果還正經刊登在了《美國物理學雜誌》上。

起因就是這位名叫Anxo Biasi的小哥,有一天觀察起了自家貓貓,突發奇想:能否將貓視為一個在人產生的勢場中運動的質點,用物理方程來描述其行為?
結果通過仔細研究,他成功構建了一個能夠定性重現多種貓與人交互行為特徵的貓貓運動方程。
此前雖然物理學家已經研究過貓的一些特性(比如貓總能四腳著地的能力) ,還有下圖這種用來描述貓越小越可愛的「黑洞貓」幽默比喻。
但這項研究是首次以方程的形式對貓的典型行為特徵進行建模。
甚至貓貓在夜間瘋狂跑酷也被再現了。
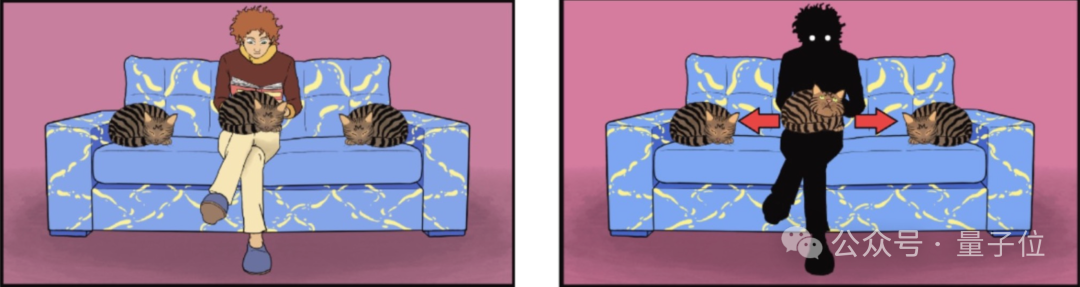
還有貓貓通常會對主人的呼喚愛答不理,它們會在最喜歡的人的腿上待更久……
趴在主人腿上VS趴在陌生人腿上,be like:
網民們覺得甚是有趣,幫助大家理解一些經典力學概念的例子+1。
真沒想到愛貓人士會做到如此地步。
貓運動方程,如何建立?
這位小哥將貓貓建模為一個點粒子,首先結合日常觀察以及各種討論中定義了貓貓的7種常見場景。
(點粒子,物理學中一種粒子理想化描述,主要特點是不佔用空間。舉個例子,只要離得夠遠,各種形狀的物體都會看似於一個點。)
明確指出的是,這是一項理論研究,沒有進行動物實驗,所有結論都建立在日常觀察和物理建模的基礎上。

此次關注的是貓與人互動的一個簡單場景:一隻貓和一個靜止的人在一起。
這7種行為分別是:
-
P1:貓休息時通常會與人保持一定距離。
-
P2:當貓趴在人身上休息時(如趴在腿上、肚子上、背上),極小的刺激就可能使它們離開這個位置(如一隻蒼蠅、一個難以察覺的聲音、鄰近星系原子的β-衰變)。產生離開所需的擾動強度取決於貓對其所依靠的人的依戀程度。
-
P3:當貓被人撫摸時,它們會前後擺動。
-
P4:當貓被人呼喚時,它們很少回應。
-
P5:當貓決定接近呼喚它們的人時,它們往往會在途中分心,無法到達對方身邊。
-
P6:晚上,貓咪會隨意在屋子裡跑酷。(這種情況被稱為 「zoomies」)
-
P7:當貓喜歡被人撫摸時,它們會發出呼嚕聲(發出柔和振動的聲音)。
當然,這些行為並不具有普遍性。有些貓也可能表現得不太明顯。
定義完之後進行研究假設:貓的行為就像它們感知到人周圍有一種力。
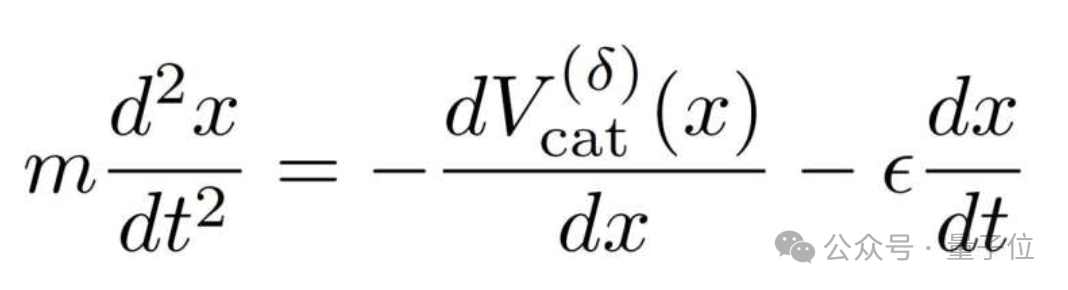
作為初步近似,他們將貓的動力學模型定義為在存在外部勢能(由靜止的人引起)和摩擦項的情況下,一個服從牛頓力學的點粒子。
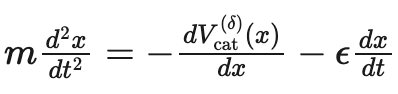
其中x(t)表示貓在時間t相對於位於x=0處的人的位置,m>0是貓的質量,並且ϵ>0是摩擦係數,其值取決於每隻貓。
將微分方程轉化為基於有理函數的形式。它提供了對平衡點的控制,這樣管理平衡點的數量、相對位置和穩定性。

其中,g>0是耦合常數(從現在起將g簡化設置為g=1,但這不會改變模型的定性圖像);δ在[0,1]區間,反映了貓對人的依戀。
當δ=0 時,點x=0(人的位置)是不穩定的:貓對人沒有依戀。
當δ>0時, 點x=0是穩定的。並且δ值越大,貓的依戀越強。當δ=1時,這表明貓對人有很強的依戀。
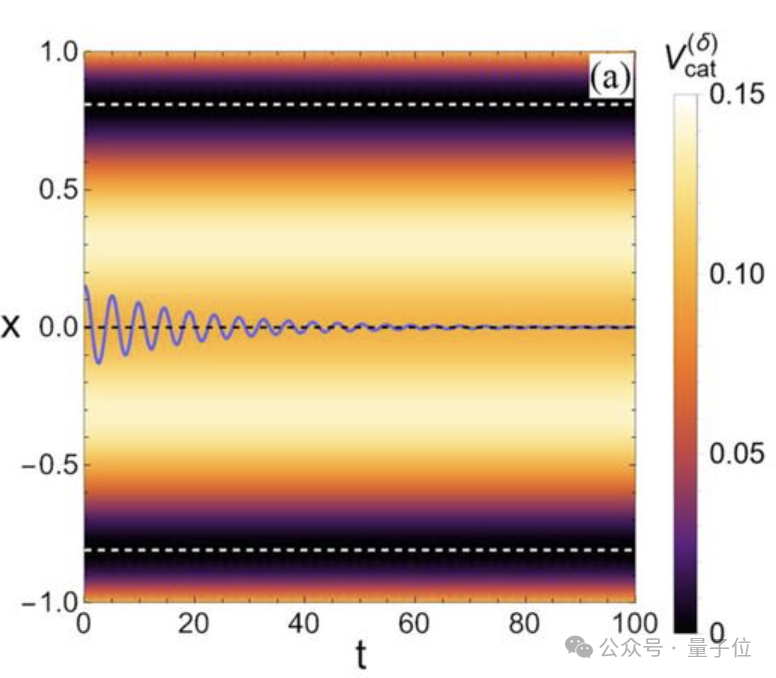
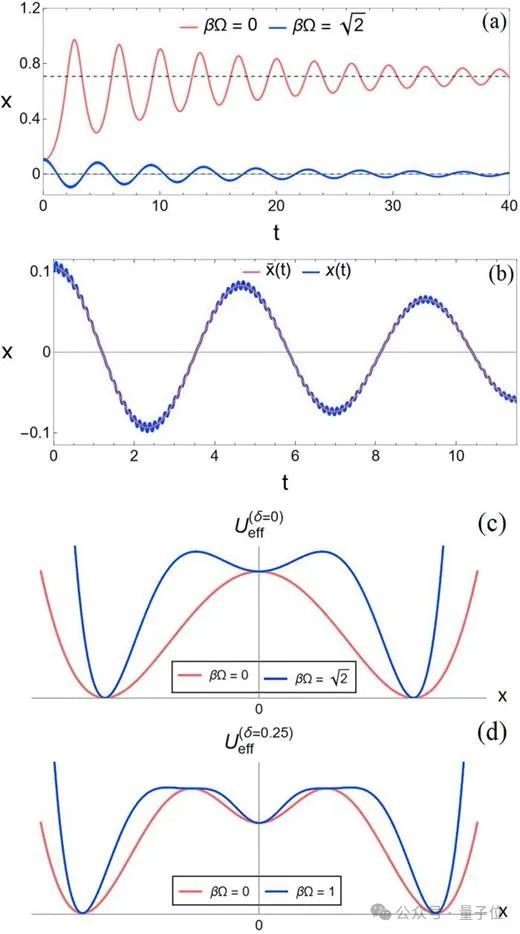
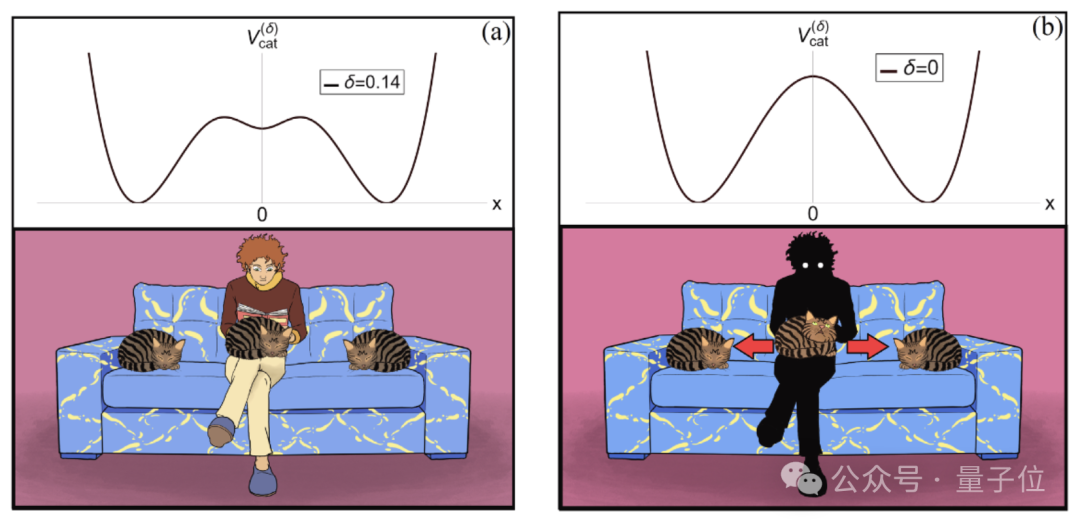 圖1:(a)貓依附在人身上,(b)人對貓來說完全是陌生人。這兩種情況貓都處於靜止狀態,處於三個平衡點。
圖1:(a)貓依附在人身上,(b)人對貓來說完全是陌生人。這兩種情況貓都處於靜止狀態,處於三個平衡點。此外,需要公式 (1) 中的摩擦項來減少能量。否則,貓在活動一段時間後就不會趨於靜止狀態,比如左右兩側∞狀態。
為了阻止貓的運動,需要ϵ≥0,而且摩擦力必須與速度的奇數次方成正比。
最後要注意的是,貓是在三維空間中移動的。然而,由於最重要的參數是貓和人之間的距離,我們假設貓沿著一條線移動,這進一步簡化了分析。
還將跑酷和發出呼嚕聲模擬出來了
基於貓運動方程,小哥將貓的7種行為定性地表示了出來。
P1:貓咪休息時通常會與人保持一定距離。這種行為被中心外的全局最小值所捕捉。
 如圖1所示,貓可能以不同的速度從許多位置開始,但由於摩擦項,最終會到達最小值。
如圖1所示,貓可能以不同的速度從許多位置開始,但由於摩擦項,最終會到達最小值。在大多數情況下,最終位置將是全局最小值,特別是對於貓和人之間的弱聯繫(δ較小時)。
當δ趨近於1時,x=0將成為額外的全局最小值。
P2,該陳述的第一部分由勢能平衡點x=0(人的位置)重現,因為貓可能靠在人身上。
該陳述的第二部分是通過勢能對δ的依賴性來捕捉的。也就是說當δ=0時, x=0是不穩定的,這表明在任意小的擾動下,貓都會偏離人。隨著δ的增長,需要更強的刺激才能將貓從人身上分離。
P3, 「當貓被人撫摸時,它們會以振盪運動來回移動。」 這種效應也在x=0附近的穩定區域重現(對於δ>0的情況)。
當貓平靜地靠近人(動能低)時,它們會圍繞人進行小幅度的振盪,並收斂到靜態,這歸功於方程中的摩擦項。
即使被陌生人撫摸(δ=0),貓也可能表現出這些穩定的振盪,但為此必須添加一個新變量(呼嚕聲)。
 觀察結果P4和P5可以用偏心最小值與人(x=0)之間的勢壘來解釋,如圖1所示。
觀察結果P4和P5可以用偏心最小值與人(x=0)之間的勢壘來解釋,如圖1所示。P4被呼喚的行為被建模為貓向人發出的衝動,這會導致動能增加,這種能量注入可能足以或不足以克服勢壘。由於能量不足,貓會在一段時間後,再次收斂到靜止位置。
如下圖藍色(較暗)和綠色(較亮)軌跡所顯示。
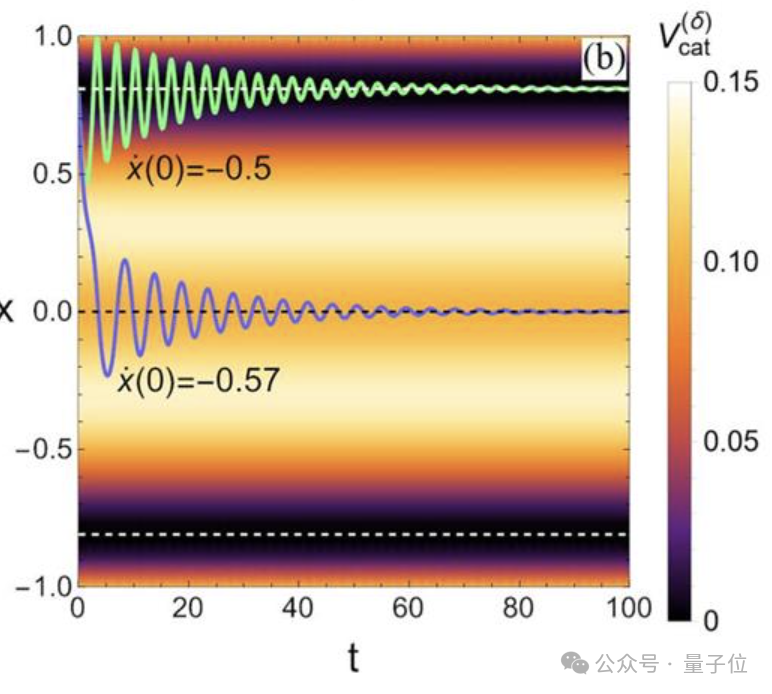
當貓受到足夠強的刺激(衝動)接近人時,也就來到了P5:「當貓決定接近呼喚它們的人時,它們經常在途中分心而無法接近人。」 這一觀察結果也用上圖綠色(較淺)軌跡所示。
這一現象中,貓的質量也會起作用(Doge), 貓獲得的速度會隨著質量的增加而減小——
體重較輕的貓(例如小貓)會表現出精力充沛的動作並對任何刺激做出反應,而體重較重的貓(例如老年貓或喂食過度的貓)則不會表現出同樣的熱情。這也與觀察結果明顯一致。

除此之外,作者還將這一方程進行了拓展:貓貓跑酷和呼嚕聲,這兩種行為也被重現了。
貓貓跑酷。
其中σ為常數,f (t) 為外部隨機強迫。在給定時間內產生快速移動的概率取決於摩擦力ϵ和強迫σ的值。
這使我們能夠根據每隻貓的特殊性調整模型。例如,小貓不斷表現出這些時期,對應於較低的摩擦力和較高的強迫力,而老年貓則很少表現出這種活動。
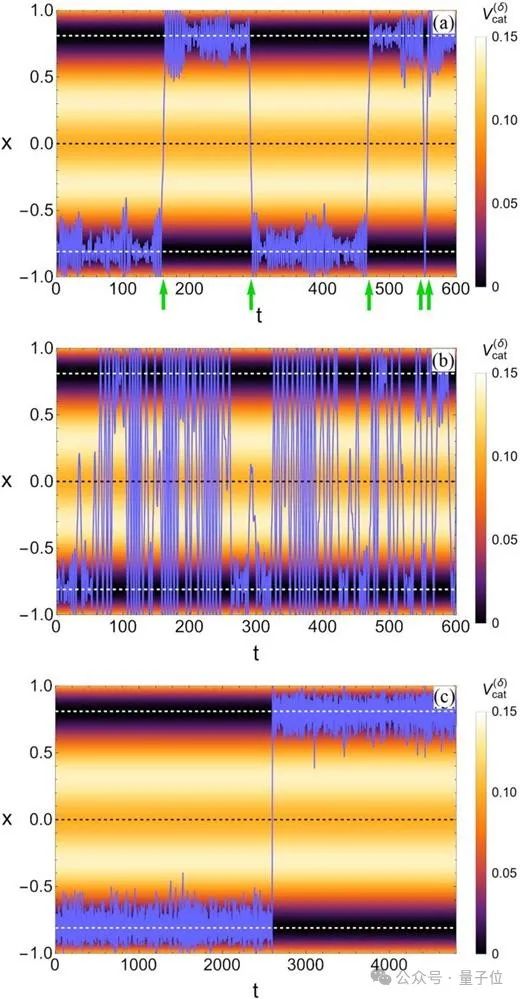
(a)顯示貓可能突然從一個平衡點跑到另一個平衡點,在那裡停留一段時間,然後再次隨機地回到上一個平衡點。(b)為小貓(c)為老年貓
對於第7種行為,作者定義呼嚕聲是一種穩定機制。
一部分原因在於當貓被撫摸並開始發出呼嚕聲時,人們通常會有繼續撫摸貓的衝動,從而通過這種方式增強了過程的穩定性。
以卡皮察擺作為類比,貓在發出呼嚕聲時會振動,振動可以作為不穩定平衡點的穩定機制,由此定義貓貓呼嚕聲運動模型:
振動可以加強貓與人之間的有效聯繫。

在原有貓方程基礎上,引入了外部振動強迫來模擬這種效果。

其中G (x) 暫時為無約束函數,β和Ω分別為貓中振動的振幅和頻率。此類驅動項模擬了在時間振盪場中移動或受到週期性強迫的粒子。
好了,此舉從物理學的角度探索了貓與人之間的互動。
作者表示,這種互動模型旨在用於經典力學的入門課程,讓學生更好地熟悉平衡點、勢壘、摩擦或外力等概念。
靈感來自於自家的貓貓
此次研究成果來自理論物理學家Anxo Biasi和他家的貓貓Eme。

他主要研究非線性演化方程的動態行為,特別關注奇異點的形成、長期動態行為和湍流問題,這在流體動力學、玻色-愛恩斯坦凝聚態和廣義相對論等領域具有廣泛應用。
Anxo此前通過巴黎高等師範學院物理系的La Caixa青年領袖計劃,加入了加利西亞高能物理研究所(IGFAE)。
在IGFAE,他已經完成了博士論文,並將加入弦理論相關領域的研究團隊,繼續研究物理學和數學交叉領域的非線性演化方程。
建立貓運動方程,最初源自於他在愚人節的一個想法:想找一種對學生更有吸引力的有趣方式來解釋物理。
他本人的貓貓Eme給了他靈感,通過仔細觀察Eme與他互動時的行為,Anxo發現這種行為模式具有重覆性和可預測性,於是開始自己嘗試用物理模型來描述這些行為。

逐漸地,這一在某種程度上看似是開玩笑的事情,呈現出了學術形態。
為此在致謝中還特意感謝了Eme。
這項工作還可以延伸到各種場景,除了可以從物理學角度探索貓與人之間互動其它特徵,還可以探討貓與貓、狗與狗或狗與人之間的互動。
好想知道貓貓打架是什麼方程哇~
 參考鏈接:
參考鏈接:[1]https://phys.org/news/2024-10-physicist-cat-reveal-equation-motion.html
[2]https://pubs.aip.org/aapt/ajp/article/92/11/827/3317285/On-cat-human-interaction-from-the-viewpoint-of
[3]https://www.phys.ens.psl.eu/en/article/anxo-farina-biasi