自動駕駛首次應用測試時計算!港大英偉達等新技術讓AI邊開邊學,無人車遇變道自如應對
Centaur團隊 投稿
量子位 | 公眾號 QbitAI
當開車遇到變道、加塞等場景時,駕駛員往往會下意識地激活自己的「安全駕駛思維」,從而做出激進的規避行為。
與之類似,自動駕駛汽車在上述場景中,更會表現得像個謹小慎微的」新手司機」,這是因為模型的決策往往依賴於工程師預設的固定規則,進而導致「不求無功,但求無過」的駕駛風格,但過多的無故急刹、過度避讓反而會引發額外的安全隱患。
針對上述問題,來自香港大學、英偉達和德國圖賓根大學的聯合團隊提出Centaur(Cluster Entropy for Test-time trAining using UnceRtainty)方法,能夠動態地改善駕駛策略,通過在線的數據驅動,擺脫了對預設規則的依賴,大幅提高了自動駕駛汽車在不確定性場景中的適應性與安全性。
Centaur在測試推理過程中動態地調整模型權重,適應OOD場景,提升泛化能力。模型利用Cluster Entropy作為自監督信號,並首次將Test-Time Training(湯臣T)應用於端到端自動駕駛,避免手動規則和成本函數,實時減少不確定性並改進預測,借由在線數據驅動實現了軌跡預測的可擴展性。

論文已上傳arXiv,代碼、checkpoint等即將開源。
駕馭不確定性
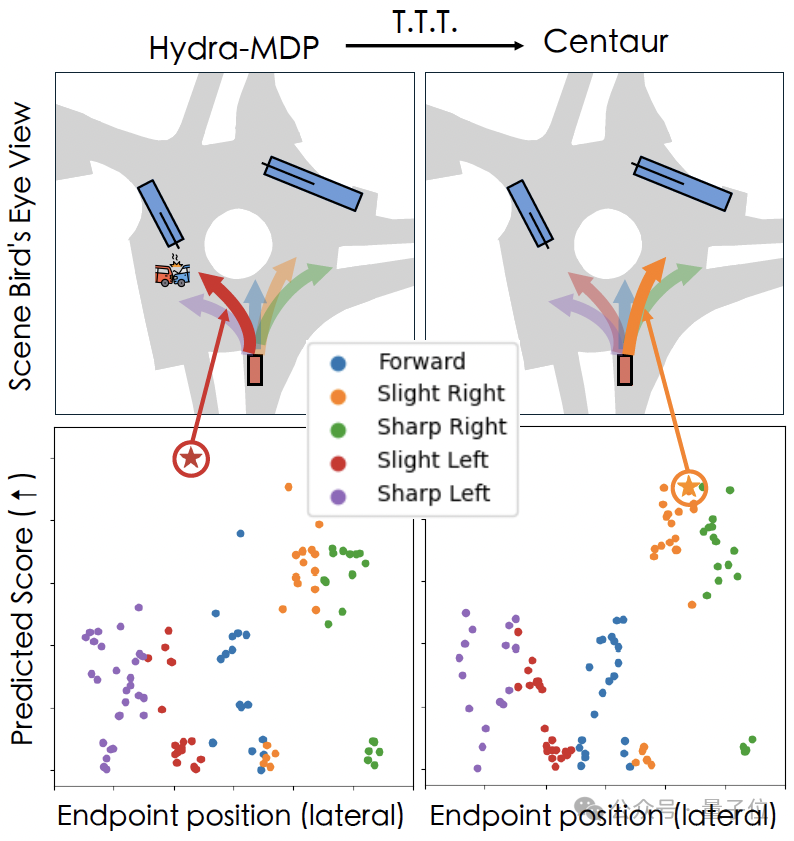
通常來說,模型是如何衡量自己輸出不確定性的?一種直觀的方法是觀察模型輸出的分佈狀態,並基於「固定采樣下,模型的輸出方向越集中,越逼近模型的最高置信度」的假設,來計算模型輸出的聚類程度,從而側面衡量出模型輸出的不確定性。
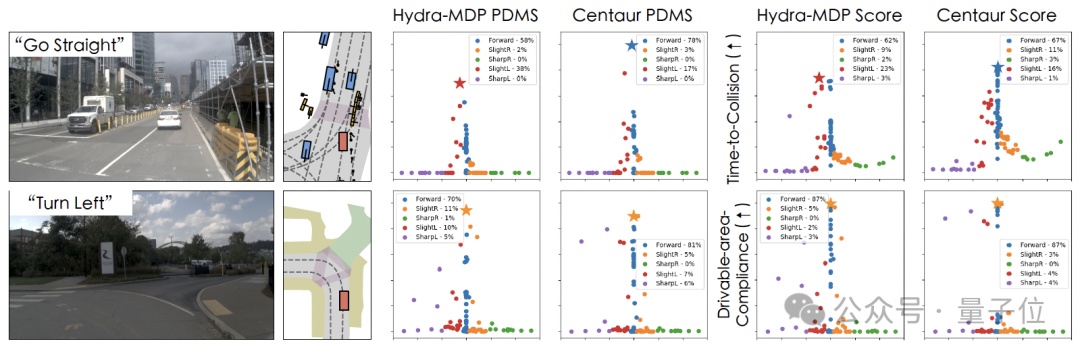
Cluster Entropy 通過軌跡采樣、聚類和熵計算來評估自動駕駛模型的不確定性。相比傳統的方法,它結合了直行、輕微右轉、劇烈右轉、輕微左轉和劇烈右轉的行為聚類,使得不確定性估計更具可解釋性。例如,當模型面對複雜的交叉路口時,Cluster Entropy 能直觀反映不同駕駛決策的不確定性,從而幫助優化自動駕駛系統的安全性。
邊行駛邊進化
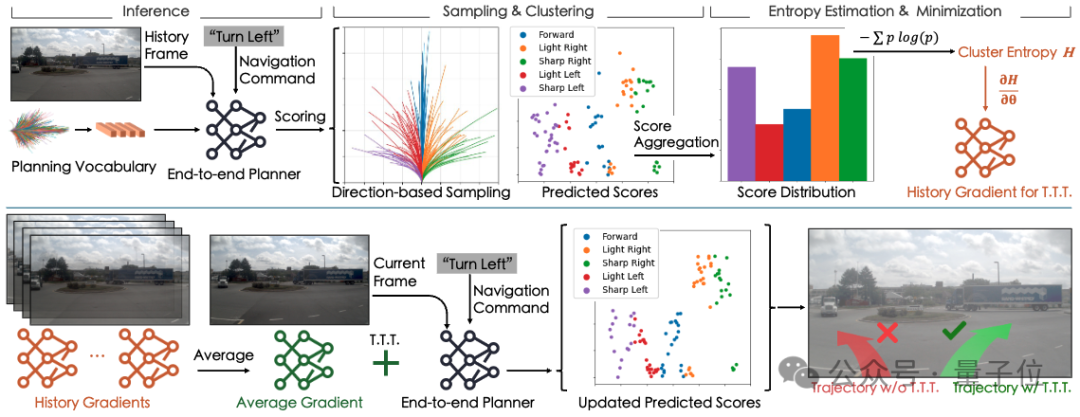
湯臣T在推理過程中利用Cluster Entropy作為自監督目標,通過梯度優化讓模型自適應地調整特徵表徵,從而提升對OOD場景的適應能力。
具體而言,模型通過計算Cluster Entropy,判斷當前環境的OOD級別。如果模型對當前環境的理解較差,則觸發湯臣T訓練過程,通過梯度下降對特徵提取網絡進行小幅度更新,使其更適應當前環境特徵分佈。這一方法使得Centaur能夠在推理時自適應地優化自身,在OOD場景中保持穩定的感知和駕駛能力,而無需依賴固定規則或人工設計的成本函數。
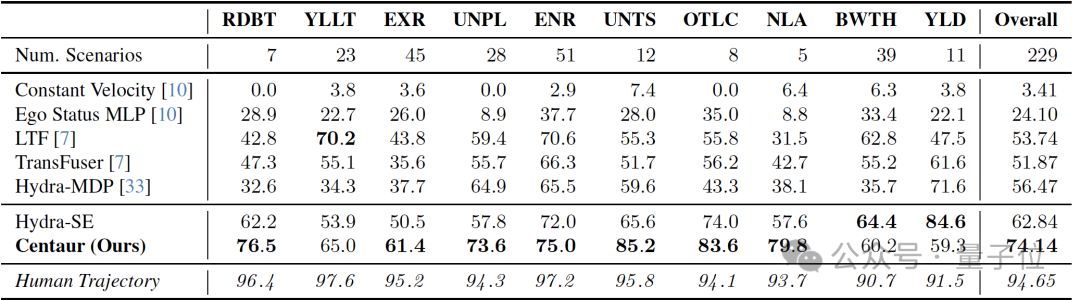
實測接近人類駕駛水平,安全性能全面提升
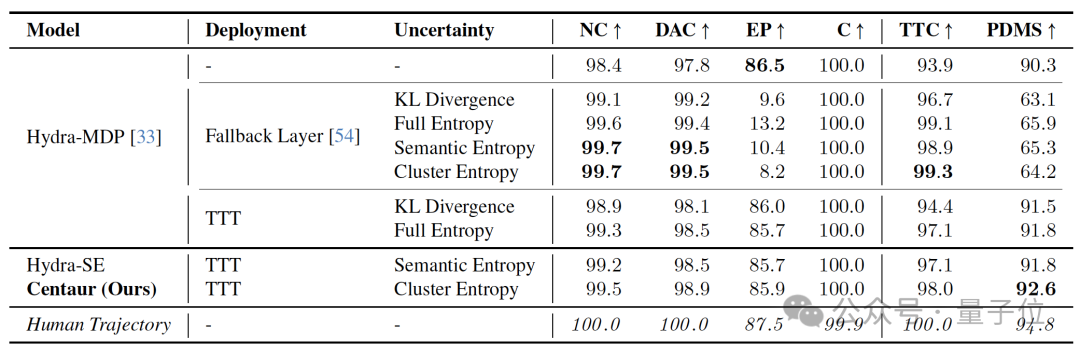
在navtest基準測試中,Centaur的綜合規劃與駕駛指標得分(PDMS)取得了92.6%的成績,遠遠超過了基於回退的方法,並接近人類駕駛水平 。此外,Centaur在碰撞避免和碰撞時間等關鍵指標上亦表現出卓越的性能。
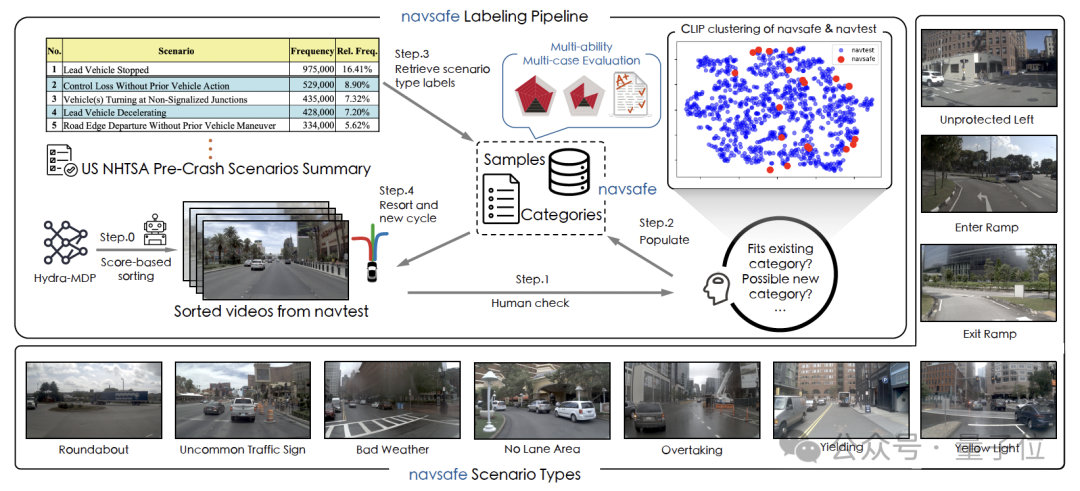
為了更好地評估自動駕駛系統在安全關鍵場景中的表現,我們提出了navsafe數據集,專門用於測試端到端駕駛方法的安全性和魯棒性。它基於navtest,並結合了真實的事故數據,通過細粒度的評分機制,量化了自動駕駛模型的不同駕駛能力,而不像navtest 只提供整體分數。
此外,Cluster Entropy作為不確定性度量工具,實現了PDMS的顯著提升,並在失敗檢測任務中, 取得了最佳結果。
論文地址: https://arxiv.org/abs/2503.11650