工業機器人開始「長腦子」了

作者/ IT時報記者 沈毅斌
編輯/ 孫妍
各家工業機器人都拿出「看家本領」來比拚。比力量,大大小小的機械臂托舉、提拉25kg、50kg等不同重量的工業產品;比速度,0.305秒還原魔方,毫秒級數據傳遞到電機;比精準,小球分類,針尖對碰;比舞蹈,機械臂隨著音樂翩翩起舞……
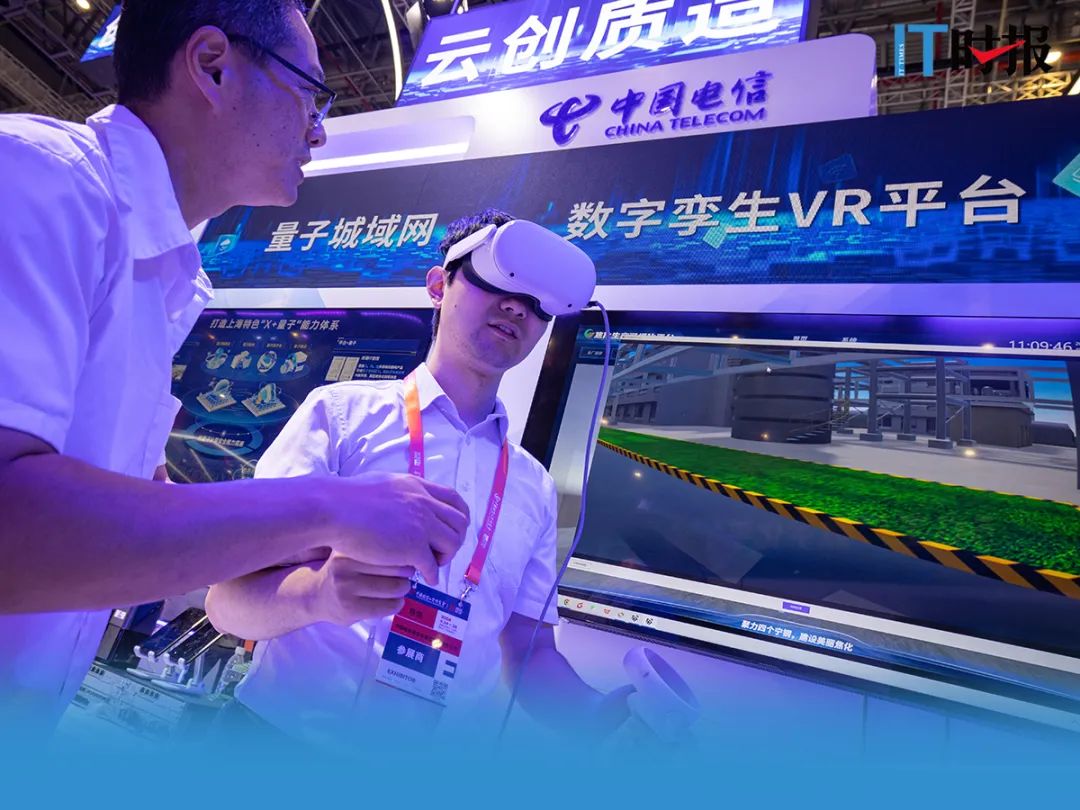
9月24日,以「工業聚能 新質領航」為主題的第二十四屆中國國際工業博覽會(下簡稱「工博會」)在上海國家會展中心開幕。來自全球28個國家和地區的2600多家工業廠商齊聚於此,帶來工業自動化、智慧能源、新能源與智能網聯汽車、工業機器人等9大主題展。
在具身智能元年,工業作為機器人技術應用的廣闊舞台,也發生翻天覆地的變化,各大工業場景對自動化需求正在加速。香港大學教授席寧認為,當前編程、校正、傳感仍是工業機器人實現智能化過程中需要解決的三個關鍵技術難題。
工業領域
手比腳更重要
走進工博會工業機器人展館,最先映入眼簾的是人形機器人展台,開普勒、宇樹科技等曾在人工智能大會亮相的人形機器人再次出現,儘管沒有應用在工業領域的展示,僅憑單一造型就吸引許多觀眾駐足。
相距不遠的埃斯頓展台,更像是機器人「樂園」,集齊了人形機器人、工業機械臂、協作機器人等多種類型,打螺絲、搬重物,甚至水下作業都一一展示。其中,站在前台迎賓的就是兩台人形機器人Codroid 01。「我們7月開始打造這款人形機器人,不到三個月時間就落地了。」埃斯頓酷卓科技有限公司首席技術官臧家煒向《IT時報》記者介紹,該款人形機器人擁有170cm的身高和80kg的體重,線性關節模組、剛性關節模組、準直驅關節模組等核心零部件都是自研,全身最大自由度達44個。

「腿可以不是雙足,但手一定是雙手。」在臧家煒眼中,工業機器人的雙臂就是工具,不僅需要承受負載,還要有靈活雙手。該人形機器人單臂可負載5kg,單臂自由度有7個,靈巧手的自由度為6—7個,距離其他人形機器人在自由度上有一定差距。
但埃斯頓堅持打造人形,臧家煒告訴記者,一方面是希望能替代傳統的體力型勞動,另一方面是通過技術迭代,賦予人形機器人多模態感知能力,擁有智能化決策能力,從而完成複雜度、附加值更高的工作。
實際上,讓人形機器人走入工業領域的並非只有埃斯頓一家,在《IT時報》此前報導中,國地中心市場體系總監楊正葉告訴就記者,國地中心正在加緊推進人形機器人訓練中心建設,首期將建成100個訓練場景,到2027年將建成1000多個通用人形機器人智能訓練道場。目前,國地中心打造的人形機器人即將進入上海電氣和上海延鋒汽車兩個工業場景進行「實習」。
7月初,傅利葉打造的智能人形機器人已經在上汽通用汽車金橋豪華車工廠和奧特能超級工廠上崗。傅利葉相關負責人介紹,這些人形機器人依靠視覺感知和靈巧手可以在工廠內完成帶電高壓零部件安裝、高精度擰螺絲操作、掃瞄標籤、搬運零部件等工作。

機器人「長腦子」
在工業機器人展區,大部分機器人旁邊都配備了一台負責指揮和調試的「大腦」,雖然是按照既定程序運行,但工作人員時不時需要檢查運行是否正常。為了徹底「解放」工作人員,就需要讓工業機器人開始「長腦子」。

微億智造與捷勃特聯合推出的新一代具身智能工業機器人創TRON亮相工博會。捷勃特現場工作人員向記者介紹,所謂的具身智能工業機器人是將傳統機器人控制算法與人工智能算法深度融合,實現感知、理解、規劃和執行能力一體化,能夠在複雜工業環境中自主學習、決策並執行高度複雜任務。簡單來說,就是讓工業機器人擁有自適應、自學習、免編程等能力,並輸出執行。
相比傳統工業機器人,創TRON擁有環境感知、任務理解、實時動態規劃和高速精準執行四大核心優勢。在環境感知方面,通過具身視覺模塊,實時捕捉動態環境變化,進行實時地圖重建,以此確保機器人與外部環境交互的實時性。
任務理解方面,傳統工業機器人能執行人類的編程指令,但無法具備柔性切線能力。創TRON無需傳統機器人編程,通過對圖片、影片、動作等進行捕捉,結合工業垂類大模型,快速完成任務理解和拆分,實現快速切線,切線時間縮短至小時級。
實時動態規劃則是通過實時3D地圖及目標任務,採用基於優化和采樣結合的方案,完成點到點路徑規劃,實時生成距離和速度最優軌跡。搭配上實時控制頻率為1 KHZ的高速精準執行機械臂,實現對軌跡的快速響應執行。
上海捷勃特機器人有限公司董事長蔣耀對媒體表示,機器人行業要走向軟硬結合、以軟為主,差異化競爭,把智能化的蛋糕做大,具身智能是突破紅海的方向之一。增加了「大腦」的具身智能工業機器人與工業機器人也並非替代關係,而是工業機器人的未來方向。

同一場景不同技術
要問哪個工業場景適合機器人大展拳腳,汽車製造一定榜上有名。人形機器人企業中,傅利葉、國地中心等都讓人形機器人在汽車製造領域 「實習」。工博會現場,多家工業機器人企業也都將汽車製造場景搬上展台,現場為觀眾演示機器人如何造車,上海節卡機器人就是其中之一。

一輛保時捷停在節卡機器人的展台中央,四肢機械臂如同護士一般「嗬護」著這輛車。「這四個機器人是協同機器人,負責車轂擰緊、車把手拉力檢測、噴漆等工作。」節卡機器人工作人員告訴《IT時報》記者,與傳統工業機器人自動化不同,協同工業機器人設計初衷是用於人機協作,例如組裝、檢測等任務,其中機器人可以完成重覆性高或者精細的工作,而人類則負責監督或者處理更複雜的工作。
這就意味著,協同工業機器人不需要過於複雜的編程,有些甚至可以通過示教器直接進行編程,適用於更多變得場景。在能耗方面協同工業機器人也比傳統工業機器人要低,「一般工業機器人能耗在1000瓦/時左右,而協同工業機器人只需要300~500瓦/時。」工作人員介紹道。
非夕科技則採用自適應機器人,所謂自適應機器人與具身智能工業機器人類似,是沿仿人化技術路線打造,融合工業級力控和AI的通用智能機器人。能夠像人一樣以手感調整為主、視覺引導為輔,在本能反應和條件反射的基礎上,進行自身技能提升。
非夕科技工作人員介紹,其核心特點在於智能方面採用層級式,第一層由AI及機器人算法進行驅動,隨後通過專用處理器搭建的層級式智能系統,提供感知、力覺引導的操控能力、強靈活性的任務規劃和實時自適應能力。
代入實際新能源汽車充電場景中,自適應機器人憑藉智能化的工業級力控能力,可通過力控搜孔、柔性裝配等決策,確保充電頭在拔插過程中柔順穩定。避免因位置不對或力度過大造成充電口損傷。
排版/ 季嘉穎
圖片/ IT時報
來源/《IT時報》公眾號vittimes